
Social Attributes of Robotic Products: Observations of Child-Robot Interactions in a School Environment
Department of Industrial Design, KAIST, Daejeon, Korea
With advances in robot technology and their increased application within commercial products, the demand for novel designs, including appearance and interaction design, is increasing in robot research. This paper focuses on the actual interactions of robotic products. Considering their significant cognitive-psychological influence and ability to collaborate intellectually with users, robotic products can be successfully designed if designers fully utilize their interactive attributes. For this purpose, a robot named ‘Tiro’ was designed and used in a real-life elementary school environment; next, the Wizard of Oz technique and video-ethnography were utilized to empirically investigate user-robot interactions. From this, sharp changes were identified in child-robot interactions despite the relatively short time frame of the study. In the earlier stages, the interactions were mostly related to the robot exterior and movement and other characteristics of the robot itself, while more interaction patterns related to its social attributes—giving of meaning, emotional expressions and relationship forming—were observed in later stages. Such dynamic changes in the patterns of child-robot interactions demonstrate the importance of social attributes among the various distinctive attributes of robots; they also suggest the possibility of social attributes as a clue towards resolving issues concerning robots and other intelligent products (e.g., short lifetime and long-term interactions).
Keywords – Human-Robot Interaction, Product Experience, Robot Design, Social Attribute.
Relevance to Design Practice – The observational results discussed here may help designers to better understand in particular the social attributes of robotic products that have been introduced in recent years. Several design implications, inferred from these results, make it possible for designers to efficiently utilize social attributes and to derive diverse product design strategies.
Citation: Oh, K., & Kim, M. (2010). Social attributes of robotic products: Observation of child-robot interaction in school environment. International Journal of Design, 4(1), 45-55.
Received: March 17, 2009; Accepted January 24, 2010; Published April 20, 2010.
Copyright: © 2009 Oh and Kim. Copyright for this article is retained by the authors, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
*Corresponding Author: silverman@kaist.ac.kr
Introduction
While the commercial potential of cleaning robots, entertainment robots, and other so-called ‘robotic products’ continue to grow, active research is being conducted on robots that can be used in our daily lives. Among information appliances, intelligence products, and other various technology-driven products, robotic products are drawing especially keen attention thanks to their attributes from the perspective of ‘product ecology,’ as Forlizzi (2007) labels it, referring to the changing uses and ecology of other products that lead their users to create social interactions. Though such social attributes of robotic products have already been discussed by several researchers (e.g., Fong, 2003; Bartneck, 2004; Breazeal, 2004; Dautenhan, 1999), little empirical/experimental research has been conducted to identify what these social attributes are really about and why they are important.
Most studies on human-robot interaction (HRI), including the one by Advanced Telecommunications Research Institute International (ATR) of Japan, have aimed predominantly at enhancing the skills and capabilities of robots from the point of view of robot developers rather than at improving their user-friendliness. Europe’s AuRoRA Project (n.d.) and other similar efforts also have limitations in that they focus only on the influences and impacts of robots on autistic children and other special users.
The distinctive interaction patterns of robotic products, which have to do with their social attributes and cognitive-psychological influence, may alter product-user relationships and significantly affect the way users’ product experiences are composed. This is why designers of robotic products are required to not only understand the social attributes of robots and the particularity of robotic interactions but also to thoroughly examine the various problems that may arise in the course of actual interactions between robotic products and their users.
To this end, this paper seeks to design actual educational robots for children and observe interactions between the robot and children within a school environment. This paper consists of three sections. First, an educational robot for elementary schoolchildren is designed and developed, based upon the particularity of the robot design process. Second, user-centered HRI design is studied, and experiments and observations related to child-robot interactions in the elementary school environment are conducted from the design perspective. Lastly, the questionnaires, preliminary interviews, and video data obtained during the course of these experiments are analyzed. As an exploratory study, this research sought to observe distinguishing features of child-robot interactions rather than to test hypotheses. Consequently, the ultimate goal of this paper is to analyze the particularities and implications of interactions of robotic products through a qualitative research approach and to determine how designers can utilize them.
HRI Research in School Environment
This paper chooses the school environment as a place for observing child-robot interactions. Children are generally deemed to be great test subjects for HRI research, as illustrated in the works of ATR and the AuRoRA Project (n.d.), in that they react sensitively to interactions with robots and that sophisticated robotic technologies are not required for interactions with children.
The school environment successfully overcomes—to some extent—the setbacks of lab-based experiments that are less realistic and of field experiments where variables are hard to control. Because children are more familiar with a school environment than a laboratory and observations are conducted during the course of standard lessons, the interactions between children and the robot can be investigated efficiently in their natural surroundings. Furthermore, a school environment has more advantages than a laboratory environment, because this research is not quantitative research in which variables must be perfectly controlled to test a hypotheses and that this research seeks to observe social dynamics between children and the robot in a real environment.
Focusing too much on the efficiency of education, conventional ‘Information, Communication and Technology (ICT)’ education in elementary school has its own limitations, so high expectations are being placed upon robotic products, which can be used to promote students’ independent learning experiences in school (Han, 2006). In his work, Norman (2007) already observed that the most promising robots in the future will be those for children and educational purposes. In this sense, the school environment provides a favorable climate and serves a good starting point for HRI experimentation and research.
Robot Design
The design process of robotic products is different from other design areas, because many of their characteristics, like autonomous recognition, perception, and actions, and their effects on user behavior patterns are different from general existing products. For a product designer, the entire robot design process is divided into three basic steps: character design, appearance design, and interaction design (Oh, Kim, & Kim, 2005), based upon the properties of social robots that include form, modality, social norms, autonomy, and interactivity considerations (Bartenck & Forlizzi, 2004). According to these design processes, the robot named ‘Tiro’ was designed to assist with sample lessons.
The hardware and software specifications for Tiro are shown in Figure 1. Additionally, a facial expression design using LEDs was designed to help children to perceive the emotion and character of the robot as shown in Figure 2.
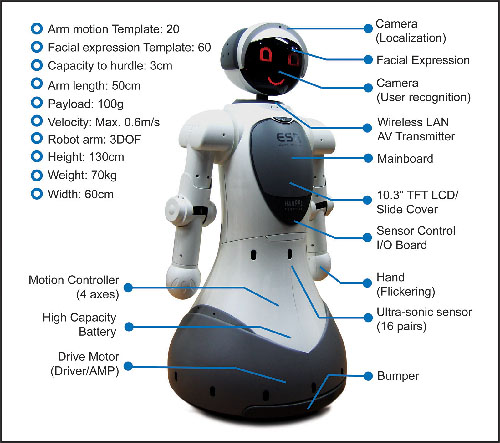
Figure 1. The specifications for Tiro’s hardware and software.
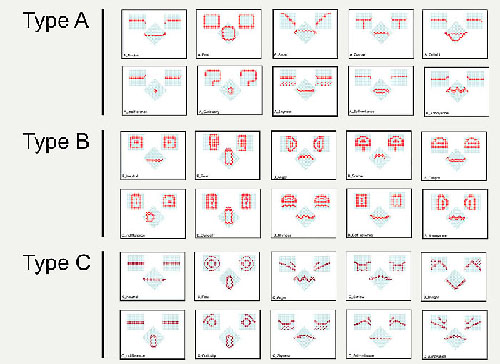
Figure 2. Set of facial expressions.
A robot with character allows users to consider the robot as a social object rather than as a complex tool (Kanda, Sato, Saiwaki, & Ishiguro, 2007). The range of emotions exhibited by Tiro through facial expressions consisted of a neutral mode, as well as fear, anger, sorrow, delight, indifference, curiosity, shyness, self-reliance, and a temper-related emotion, all of which was based upon the emotion theory of Ekman and Freiesen (1971). Each emotion has a subset of optional expressions so that natural emotional interactions are possible.
HRI Experiment
Robots are recognized by users in different ways, depending upon the interaction systems applied, even when the same technologies are used. Hence, research on HRI has an extensive impact upon the process, from setting the concept of a robot to designing its exterior accordingly. Therefore, designers of robotic products must have a thorough understanding of HRI, as well as appearance design work.
Unlike human-computer interactions (HCI), HRI has characteristics like a sophisticated cognitive environment, technology intensity, mobility, action-based interactions, object recognition-based artificial intelligence, a multi-user concept, a human-like exterior, and the implementation of physical functions (Forlizzi, 2007). To identify actual interaction patterns between robots and users and then extract the interaction needs of robot users, sophisticatedly-constructed experiments that observe their inner selves as they interact with actual robots must be conducted with consideration for such aspects. In this study, we executed sample lessons as HRI experiments to answer the following research questions:
- How do children interact with a robot?
- What particularities of interactions exist between children and a robot?
- How do the patterns of children-robot interactions change over time?
User-centered HRI
Research on interactions between humans and robots can be seen from two perspectives (Oh & Kim, 2007). The first is robot-centric research on interactions. This is how robotic engineers view HRI; most robot-centered studies focus on robots’ perceptions and cognition of humans and related actions (J. Kim & M. Kim, 2005). R. A. Brooks, C. Breazeal, and others at MIT are prime examples of robot-centric interaction researchers who focus on robot control and implementation technologies.
The second perspective for research is user-centered interaction, which focuses more on how humans perceive and cognize robots and how they act during their interactions with them than on how robots view humans (Figure 3). This is research on interactions from the perspective of robot designers rather than robot engineers. These designers study emotional bonds or feelings that users develop using robots in the real world, as robots penetrate humans’ daily lives more deeply than other products and bring about various changes in their lives.
For instance, robot-centered HRI research aims at facilitating robots to better perceive users, resemble human facial expressions, and effectively deal with tasks given. User-centric HRI research, on the other hand, seeks to make robots generate a better and more comfortable impression among users and to develop pleasurable experiences between users and robots while they cooperate on tasks like playing puzzle games or watching TV together. This is because the human-like qualities of a robot are more suitable for carrying out human-friendly tasks, such as emotional tasks, than for efficiently performing work.
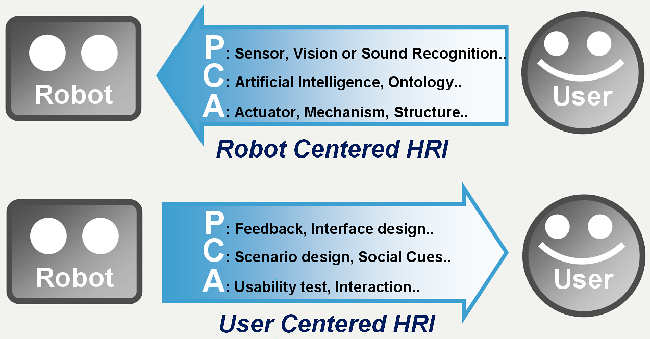
Figure 3. Robot-centered or user-centered HRI.
Elements of HRI Experiment for Designers
Designers conduct HRI experiments for purposes different from those of engineers. Consequently, they must adopt different approaches, including how they define problems. That is, the outline of experiments for designers should be developed in advance. Robot designers carry out HRI experiments to determine three elements (Oh & Kim, 2007).
The first relates to the robot’s exterior and pertains to emotions felt from the robots’ exterior shapes or actions. Studies on the shapes and proportions that users feel are adequate for the character and role of robots have been carried out, as well as research on which kind of materials are suitable for different purposes. The second is research on the usability of robots. These studies address whether the implementation of a robots’ physical functions is safe to users and how input/output devices should be set to ensure effective interactions. The third is research on mental and reflective attributes that users gain from their interactions with robots, such as intimacy, bonds, trust, and emotions. These studies investigate changes in human role setting, life patterns, and values resulting from the inclusion of robots in their daily lives.
The three experimental elements described above are in line with what Norman (2004) has referred to as the three levels of design (visceral, behavioral, and reflective) and with what Forlizzi (2007) referred to as the three ways people collect and use products (functionally, aesthetically, and symbolically). These elements help designers to easily determine and solve design-centered HRI problems. In the research, this set of elements was applied to identify the kind of data that should be collected during our sample lessons and to set conditions for Tiro and the class environment.
Conditions of the Field Study
For observing natural interactions between the robot and children in a child’s daily school environment, we orchestrated three identical sample lessons with the robot Tiro. The sample lesson was conducted twice at school A (Daejeon Eo-eun Elementary School) as pilot experiments and once at school B (Cheongju Byun-il Elementary School) as the ultimate experiment in Korea (Figure 4).
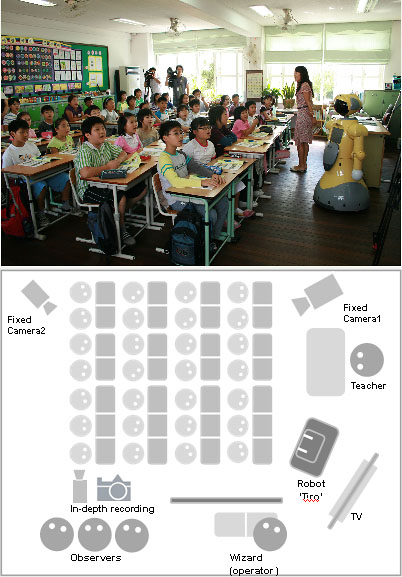
Figure 4. Tiro’s position in the classroom: picture (top) and schematic diagram (bottom).
Through pilot testing, several conditions, such as the duration of each experimental session were determined, and unexpected problems and errors were identified and adjusted for during the observation process. Using Tiro’s English content, the teacher created a lesson for students in a fourth-grade English class with nearly 30 students per lesson. All sample lessons and observations were performed during the fourth period of the day and during lunch hour.
Although Tiro can recognize human speech and make verbal replies due to its programming, in this study it communicated with children using what is known as the Wizard of Oz (WOz) technique (Gould, Conti, & Hovanyecz, 1983), as well as text-to-speech (TTS), which were controlled through the keyboard input of an operator.
The wizard (operator) provided the robot’s artificial intelligence (AI). It was inevitable that the wizard was visible to the students and observers, because the experiment was conducted without laboratory facilities. However, Korean school children are used to having outsiders in their classroom, because sample lessons are so frequent in Korean general schools. In this experiment, the wizard was in the same classroom as the children, but he was hidden by partition panels and not perceived as the robot operator. Consequently, we deemed it unlikely that his presence biased experimental results (Hoysniemi & Read, 2005).
Tiro filled the role of a teaching assistant, getting children’s attention, playing, and explaining educational materials. The interaction content of the robot was intended to intervene consistently with the lesson thanks to the help of colleagues at a teachers’ college. This research sought to understand the effects of common robot interactive functions, such as autonomy, communication, movement, and emotional expression, rather than certain special traits of robots that affect child-robot interactions. For this reason, the interaction content of the robot was developed to behave passively rather than actively, such as talking to children first and inducing communication, although real robots generally are not so.
The sample lesson had the advantages of a real field experiment; however, it was difficult to anticipate and control certain variables like the school bell and other noises coming from outside the classroom. Nonetheless, for well-knit experimental scenarios and pilot tests in school A, other unexpected variables (e.g., confusion resulting from the entrance and exit of outsiders) were controlled.
Observation Methods
HRI experiments require thoroughly-considered experimental environments, as they observe human perceptions and actions in their responses to robots. It should be noted that due to novelty effects, users who are interacting with robots for the first time tend to generate excessively positive opinions for all items.
One important objective of the experiment was to make participants recognize the robot in a correct way through appropriate explanations and a warm-up session prior to the main experiment. The experimenter also needed to make them understand the robot’s restrictions. This helped participants to be efficiently immersed in the HRI.
Through observations and subsequent data analyses, attempts were made to understand how robotic products interact with children and how they naturally affect their daily activities. The observations were carried out using questionnaires, preliminary interviews, and video ethnography
Questionnaires and Preliminary Interviews
On the basis of the elements of the HRI experiment, the questionnaires and preliminary interviews included content concerned with the reflective aspects of the interactions, such as descriptions of one’s own robotic products, differences from other learning-assistant products, manners of perception and cognition, and perceived changes relating to the robot after versus before the lesson.
Video-ethnography
Video ethnography was conducted so as to extract insight from general observations of the children’s reactions during child-robot interactions. Video recording was carried out in two ways, as shown in Figure 4. The first involved recording of the entire lesson by one or two fixed video cameras, and the second was in-depth recording of the areas in which communication and interaction responses occurred. To gather consistent data without disturbing the lessons, we conducted in-depth recordings of the interactions of six children who were seated at the periphery of the classroom. These recording data were used for video protocol analysis.
Observation by video record has the advantage of capturing the subconscious behaviors and responses of users. Non-verbal interactions, such as natural behavior or the facial expressions of children, are invaluable and not easily attained in controlled experiments in laboratories.
Results
Questionnaires were administered to 33 children, and preliminary interviews were recorded with 20 children. Approximately six hours of video data were recorded. All of the participants were elementary school students who were eleven years old at the time of the study.
Early Results 1: Insights from the Questionnaire and Preliminary Interview
- Conceptual sense of distance to the high-technology robot: General opinions regarding the robot’s tone of voice were that it was “easy to comprehend” (45%) and “sweet to listen to” (36%). According to the respondents, it was difficult to make the conceptual sense of the distance between humans and robots short as the robot was clearly perceived as a complex artifact derived from high technology. On the other hand, it was generally understood that the use of the actual functions of robots, such as a touch-screen or a voice-recognition function of robots, is simple.
- Desire to interact physically: The question, “Which subjects do you want to study with robots?” was posed to the students. Their selections included “physical exercise” (45%), “mathematics” (30%), and “art” (9%). In addition, they also reported a desire to participate in physical activities, such as “playing ball” and “hide-and-seek” with robots.
- Desire for communication and emotional interactions: The children wanted to communicate (58%) and take pictures (18%) with the robot during their rest time. They were also eager to interact emotionally, an exercise that is not possible with a TV or PC. To the question - “What type of robot do you want to have?” - most children answered “a robot that can communicate like a friend,” “a robot that can have a heart-to-heart talk with me,” or “a robot that has a warm heart.”
- Content for a robotic product: Responses, such as “Initially, it looked like a computer, but after the lesson, it felt like a friend or a warm-hearted teacher,” suggest the importance of the content of the robot itself. On the other hand, the inclusion of the touch panel interface on the chest area of the robot caused children to perceive it as a machine.
Early Results 2: Insights of Video Ethnography
- Novelty effect: Children marveled at the simple movements of the robot, such as the nodding and shaking of its head. They regarded the robot as something with free will despite the fact that the robot was controlled by TTS and WOz techniques. Movements and the flickering of lights on the hands of the robot were highly effective at grabbing the attention of the children. In contrast to physical interactions, the novelty effect of the verbal responses as if the robot had intelligence continued to the end of the observation.
- Self-expressions of children: When the robot answered questions correctly, children became very excited and began to ask many more questions due to their desire to make their presence felt. Projected behaviors to attract the attention of the robot were frequently observed.
- The mimic: Repeat studies with Tiro in a role-playing or a singing activity were very popular, and mimicking the speech or behavior was very exciting for children. It was observed that these activities increased the level of participation by children in the lesson.
- Responses to human functions: It was interesting that there were differences between the children’s responses to human functions, such as facial expressions or conversation, and their responses to machine functions, such as the flickering of lights or touch screen interactions. Some of the students appeared to be shy of one-to-one communication with Tiro but were pleased when their names were called out by the robot.
Video Protocol Analysis and the Results
Video protocol analysis was executed to thoroughly investigate changes in interaction patterns. Due to the difficulties of the field study, it was challenging to gather concurrent verbalization protocol data through ‘think-aloud’ activities. Thus, this study collected ‘retrospective verbal reports’ through in-depth interviews after the sample lessons. The in-depth interviews were helpful to illustrate the patterns of thinking by the children as they pursued the reasons behind each interaction.
Protocol data were analyzed in the following order: First, the categories of interaction patterns were constructed by means of the KJ method (Lee, 1995), which is an alternative term for affinity diagram. Second, in order to examine the stability and quality of the protocol data, the training procedures were executed with a small sample of the protocol data until inter-coder reliability achieved the required level. In this study, we used Cohen’s kappa (k) (Cohen, 1960) to calculate inter-coder reliability, which is a general approach for qualitative studies (as cited in Rust & Cooil, 1994). Third, based upon the results of the training procedures, the coding scheme was developed through refinement. Lastly, with the developed coding scheme, the full sample of the protocol data was coded, and inter-coder reliability measured.
In this study, two groups of coders were used because using groups of coders enhances the reliability of each coding and costs less than using several individual coders. Each group was composed of 3 coders with the number of groups the minimum required for reliability measures. The threshold for adequate level of reliability (the value of kappa) was set as 0.70, because this study was an exploratory study (Rust & Cooil, 1994).
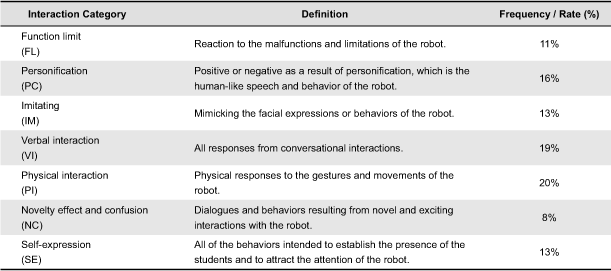
Reactions and dialogues between children and the robot in the video records were considered as interactions. For video protocol analysis, ten-minute video records that were randomly extracted from the entire set of interaction video records were transcribed into text. From text and written records of particular matters while the sample lessons were carried out, interactions between children and the robot were classified and grouped. Interaction categories for the coding scheme were devised as in Table 1.
Table 1. Coding scheme.
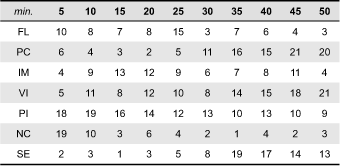
In order to construct predetermined video segments, one coder group segmented the video into 732 units, and then the other coder group revised the segments into 761 units. Through discussion, the final segments were constructed into 754 units. The video was segmented every time a behavior or communication occurred during child-robot interactions. The final video was close to 50 minutes long. As a next step, we classified all video segments by the coding scheme and conducted an encoding process: coding video segments by interaction category and summing the frequencies for each category within every five minute period of video record. Table 2 is the raw result of encoding, which includes only the data of inter-judge agreements (paired combinations for which a pair of judges agreed).
Table 2. Raw results of encoding process.
Cohen’s k is a measure of the observed proportion of agreement that is greater than what would be expected by chance. This is defined as

TOT is the total proportion of judgment (judge pair combinations), and F0 is the proportion of inter-judge agreements.Fc is the proportion of agreements that would be expected by chance, calculated as

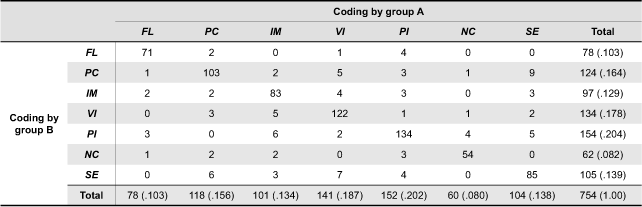
The variable ‘j’ in the equation is the total number of categories in the coding scheme. Ai is the proportion of agreements in the ‘i’th category of coder group A, and Bi is the proportion of agreements in the ‘i’th category of coder group B. With the equations and the data in Table 3, the values of F0 and Fc were calculated as 0.86 and 0.15, respectively. Inter-coder reliability was calculated as k=0.84, which exceeds the threshold k value of 0.70 (in the exploratory study).
Table 3. Encoding data for calculating inter-judge agreements.
Finally, we drew a frequency graph diachronically with the raw results of encoding data (Table 2), as shown in Figure 5. The frequency graph of the interaction categories suggests an interesting fact. While initially-frequent interaction categories (marked in blue) gradually decline in frequency, the categories whose frequency were initially low (marked in red) see their frequency later increasing gradually.
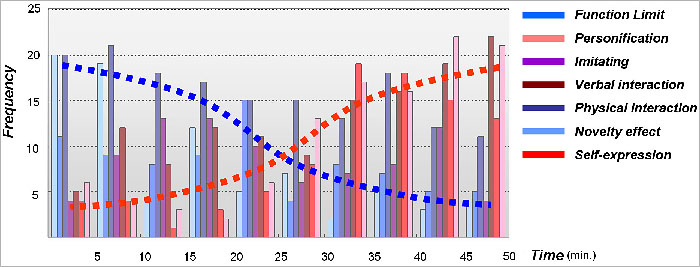
Figure 5. Frequency graph of interaction categories.
Factor analysis was conducted on the data in Table 2, and the results supported that interaction categories could be separated in two groups: the blue group and the red group. As shown in Table 4, the correlation values among FL, PI, NC and among PC, VI, SE were positive and relatively high compared to others. The correlation value of IM (which is shown as violet in Figure 5) was negative or relatively low with all other categories.
Table 4. Correlation matrix.
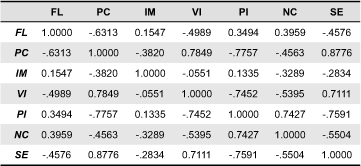
From the results of factor analysis, the Eigen-value of the first factor was 4.18, which indicates that 60% (4.18/7) of all the data in the seven categories were explained by grouping them into two categories (Table 5). Without the data of IM, the Eigen-value of the first factor was calculated as 4.14, such that 69% (4.14/6) of all the data were explained.
Table 5. Eigen-values of the correlation matrix.

Such grouping and changes in the interaction categories are very intriguing, but to understand their implications, we must first understand why children chose to interact this way.
For this purpose, this paper seeks to identify their inherent causes by determining the correlation of these categories with retrospective verbal reports (in-depth interview results). Interaction categories seen in video observations are focused on the ‘latent reactions’ of children; changing trends in Figure 5 are analyzed not from the children’s point of view but from that of the researchers observing them. Thus, the causes and implications of these changing trends can be mostly clarified by reviewing the ‘explicit reactions’ of children that are found from the retrospective in-depth interviews and can explain why such categories are generated.
Figure 6 is a matrix formed for this purpose, with its columns filled with interaction categories in the video coding scheme and its rows with keywords that were results from summarizing and indexing the retrospective interview for efficient data handling.
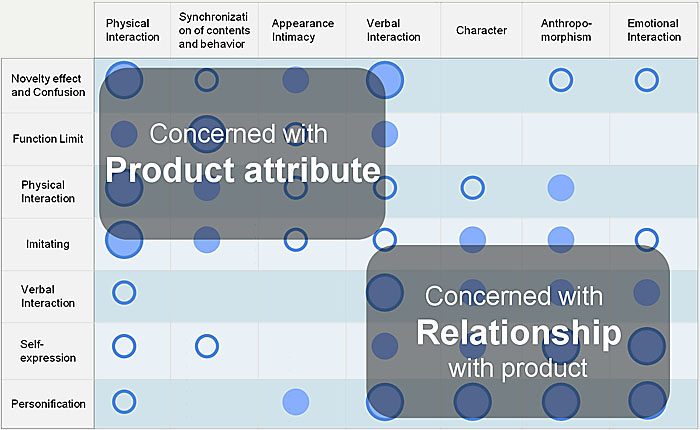
Figure 6. Causal relationship matrix between latent reactions and explicit reactions.
Inside the matrix are different-sized circles by density of causal relationship. The columns and rows in the figure had been rearranged to facilitate the analysis of the results; the interaction categories on its columns were rearranged by time-specific frequency as shown in Figure 5, and the rows with similar-sized circles were brought together. Similar to applying the design structure matrix (DSM) to system decomposition, reordering rows and columns can provide new insights (Browning, 2001). These rearrangements did not distort the data, because entire columns and rows were moved to preserve the original relationships.
Interesting groupings were found at the top left and bottom right. As for the first group, product attributes, such as exterior, physical functions, and content synchronization, affected the perceptions and responses of children, which in turn influenced the high frequency of bluish interaction categories in Figure 5. In the case of the second group, the anthropomorphic functions, emotional interactions or character of robotic products affected the reddish interaction categories (e.g., self-expression and personification) in Figure 5.
All in all, the first group generally represents keywords and interaction patterns related to the attributes of the products themselves, while the second group has to do with the secondary impacts of product usage, and eventually, interactions concerned with social relationships between the products and their users. Considering that the interaction categories on the vertical columns were rearranged in chronological order, these results demonstrate that the pattern of child-robot interactions shifted quickly from product attribute-related interactions to those related to the formation of social relationships.
Discussion
From early results of sample lessons, insights, such as ‘physical interaction,’ ‘character,’ ‘desire for communication,’ and ‘emotional interaction’ were extracted from both questionnaire data and preliminary interviews, and interaction patterns, such as ‘mimicking,’ ‘self expression,’ and ‘relationship forming’ were observed by video ethnography.
Children refer to a robot as he or she—instead of this or that—from the very beginning of their encounter, owing largely to the anthropomorphic shape, behaviors, or expressions of the robotic product. We, however, were pleasantly surprised and very much intrigued to see them going beyond this and demonstrating unexpected behaviors, like bragging about their interactions with the robot to their friends, sympathizing with the robot, and sharing with the robot their innermost secrets that they had never told their friends. From retrospective interviews with these children, we inferred that conversations with and facial expressions representing emotions by robotic products are the very elements that lead users to have such interactions with them.
The following are the results of our video protocol: Causal relationship analysis based upon the matrix and the frequency graph demonstrates that there definitely are physical and functional interaction patterns related to product attributes, as well as emotional and communicative interaction patterns that are concerned with social relationships in the interactions between children and robots.
What is also very interesting is that the interaction patterns of these robotic products change dramatically within just an hour, while those for other products would generally change over several months or years. Such dynamic changes in the interaction patterns can be better explained by applying M. Hassenzahl’s (2002) ‘product attribute’ theory or the concept of ‘product attachment’ from Mugge, Schoormans, and Schifferstein’s (2008) study.
Applying Hassenzahl’s Theory
Hassenzahl (2002) divides the character of a product that constitutes user experience broadly into ‘pragmatic attributes’ and ‘hedonic attributes.’ With these concepts being applied, the findings of this paper can be summarized as follows: During initial interactions between children and robots, pragmatic values (e.g., size, movement, color, and functions) are highlighted, while hedonic values (e.g., symbolic meanings of robotic products, self-expression using robots, giving of meaning, and forming of social relationships) play a greater role in later interactions.
This may also be explained using Hassenzahl’s concepts of ‘satisfaction’ and ‘pleasure.’ Exchanged in the early stage of child-robot interactions are expectations of and satisfactions with robotic products. In the later stages of the interactions, on the other hand, users get unexpected delight (i.e., pleasure) by giving meaning to robotic products and sharing feelings with them. It is obvious that pleasure plays an integral role in constituting product experiences, hence the following conclusion: One who better utilizes the interaction patterns found here in the later stages of the interactions can provide greater product experience for users of robotic products.
Applying Mugge's Theory
These test results are very interesting to look at from the perspective of ‘product attachment,’ a concept that Mugge et al. (2008) introduced. In their study, Mugge et al. asserted that products can induce continuous positive feelings when they form a strong sense of attachment for their users, which eventually increases their lifetime and contributes to sustainable product design. She found four elements for sustainable product design (i.e., pleasure, self-expression, group affiliation, and memory), which are equivalent to what Hassenzahl suggested as constructive elements of hedonic attributes: stimulation, identification, and evocation. Against this backdrop, the responses that are related to hedonic attributes—the symbolic functions of robotic products, such as giving of meaning, self-expression, and forming of social relationship—in child-robot interactions in this research may be seen as factors resulting in a strong sense of attachment between the children and the robot.
Given the serious considerations being made on long-term interactions in HRI and emotional experiences in the field of product-user interaction, the findings of this experiment, which indicate a strong sense of attachment between children and the robot, holds great significance. In other words, the experiment shows that (a) the social interactions of robotic products, especially the way that they form social relations, can contribute greatly to ensuring long-term interactions and enhancing sustainability; and (b) the social relationships formed may serve as key issues that affect emotional experiences and change the psychological lifetime of the products. This possibility has been backed by several studies on person-product relationships.
Furthermore, this paper has brought about dynamic changes in interaction patterns and successfully formed a sense of attachment within hours, while conventional products generally form a sense of attachment over a long period of several years. In this sense, we can see how important the social attributes—not to mention their particularity that sets them apart from other conventional products—are for robotic products.
This paper has been structured around children, who are sensitive to such interactions, so its findings cannot, of course, be applied to all age groups. Nevertheless, these findings imply the considerable potential of robotic products and the influence of their social attributes.
Design Implication
The dynamic changes in the interaction patterns of robotic products and their implications that this paper suggests are a very interesting subject for product designers; it has also provided various insights into the interaction design of robotic products. On this basis, we propose the following broad guidelines for designing robotic products in consideration of their social attributes:
- Use of an anthropomorphic form: Anthropomorphic forms of a product aid users in building a social relationship with it, effectively increasing favorable impressions. Emotional interactions facilitate and trigger personification. Though it was driven by a very simple structure with an LED panel, the emotional expressions on it appear to have more advantages for human-robot interactions than designers may expect.
- Satisfy self-expressive needs: In contrast to other products, Tiro was described by children not in functional terms but from a symbolic point of view. Children were very proud to both verbally and physically interact with Tiro, because they thought that interactions with Tiro communicate their identity. Generally, the identity of the user is associated with purchases or possessions; however, for robotic products, the identity is instead more related to interactivity with the robot or the strength of relationship between the robot and its users. This is because a strong relationship/interactivity shows that the user is special and very important to the robot. This observation will be helpful to enhance loyalty to other robotic products.
- Consider the emotional aspects: In the sample lessons, most of the children regarded the robot as a friend. The anthropomorphic form of the robot was designed not for efficient operation of the robot but to help it interact emotionally. As shown in the early results, children mostly wanted to communicate and share their emotions with the robot.
- Realization of physical interaction: Children were highly interested in the physical functions of Tiro. The software contents coupled with physical interactions efficiently induced active responses from them, causing them to become fully immersed in the interaction.
The above guidelines may be applied not only to robotic products but also to other intelligent products. They will help promote the formation of social interactions between the products and their users, ultimately bringing about long-term interactions. The importance of long-term interactions has already been mentioned (Kanda, Hirano, Eaton, & Ishiguro, 2004). In order for robotic products to be actually applied to our daily lives, research should be made on content upgrade, pseudo-development, and other tools for inducing long-term interactions. As described in this paper, children showed dramatically less favorable reactions toward the exterior of robotic products when novelty effects were lost, but they still remained interested in conversations, emotional expressions, and other interactions for forming social relationships. Mugge, Schifferstein, and Schoormans (2006) concluded that designers should first of all strive for continued product usage to maintain the product’s special meaning and its impact on the experience of attachment.
Conclusions
Given that robotic and other cutting-edge technologies will be applied to a vast majority of products in the future (Norman, 2007), research on the design of robotic products at this point in time holds great significance. This paper has presented the results of observations and analysis of robotic products and their interaction patterns with children in a school environment. Observations of child-robot interactions were performed primarily through questionnaires, video-ethnography, and video protocol analysis.
Rapid changes in interactions with the robotic product shown here—the transition from primary interactions regarding product attributes into high-dimensional ones like symbolic meaning, relationship forming, and social implications—have been found to be their distinctive and intriguing characteristics. What this implies is that, when users build their product experiences through interactions, their interaction pattern changes from ‘sub-consciousness’ to the highest criterion of ‘storytelling’ among the four criteria for evaluating interactions suggested by Forlizzi (2000). It also means that users subjectively internalize their product experiences and assign personal meanings to interactions.
Social interactions—including the friendships that users experience while using products—are important, because users not only remember their experiences, they also reorganize their memories into something meaningful depending on the context. We have discovered that how such characteristics are utilized in the design process may significantly influence the value and marketability of robotic products.
As a result of this research, insights and interesting design implications are revealed that can help designers to develop proper content and build quality HRI systems. They also afford opportunities for designers to conduct aggressive research involving new design areas and robotic products.
Reference
- AuRoRA Project. (n.d.). Retrieved March 1, 2009, from http://www.aurora-project.com
- Bartneck, C., & Forlizzi, J. (2004). A design-centered framework for social Human-robot interaction. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (pp. 31-33). Piscataway, NJ: IEEE.
- Bartneck, C., & Forlizzi, J. (2004). Shaping human-robot interaction: Understanding the social aspects of intelligent robotic product. In CHI ‘04 Extended Abstracts on Human Factors in Computing Systems (pp. 1731-1732). New York: ACM.
- Breazeal, C. (2002). Designing sociable robots. Cambridge, MA: The MIT Press.
- Breazeal, C. (2004). Social interactions in HRI: The robot view. IEEE Transactions on Systems, Man and Cybernetics, Part C: Applications and Reviews, 34(2), 181-186.
- Browning, T. R. (2001). Applying the design structure matrix to system decomposition and integration problems: A review and new directions. IEEE Transactions on Engineering Management, 48(3), 292-306.
- Cohen, J. (1960). A coefficient of agreement for nominal scales. Educational and Psychological Measurement, 20, 37-46.
- Dautenhahn, K. (1999). Robots as social actors: AuRoRA and the case of autism. In Proceedings of the 3rd Conference on Cognitive Technology (pp. 359-374). Los Alamitos, CA: IEEE.
- Ekman, P., & Friesen, W. V. (1971). Constants across cultures in the face and emotion. Journal of Personality and Social Psychology, 17, 124-129.
- Ericsson, K. A., & Simon, H. A. (1993). Protocol analysis: Verbal reports as data. Cambridge, MA: MIT press.
- Fong, T., Nourbakhsh, I., & Dautenhahn, K. (2003). A survey of socially interactive robots. Robotics and Autonomous Systems, 42(3-4), 143-166.
- Forlizzi, J. (2007a). How robotic products become social products: An ethnographic study of robotic products in the home. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (pp. 129-136). New York: ACM.
- Forlizzi, J. (2007b). The product ecology: Understanding social product use and supporting design culture. International Journal of Design, 2(1), 11-20.
- Forlizzi, J., & Ford, S. (2000). The building blocks of experience: An early framework for interaction designers. In Proceedings of the 3rd conference on Designing Interactive Systems (pp. 419-423). New York: ACM.
- Gould, J. D., Conti, J., & Hovanyecz, T. (1983). Composing letters with a simulated listening typewriter. Communications of the ACM, 26(4), 295-308.
- Han, J., & Kim, D. (2006). A field trial on robots as teaching assistants and peer tutors for children. In Proceedings of the Asia Pacific International Symposium on Information Technology (pp. 459-501). Hangzhou, China.
- Hassenzahl, M. (2002). The effects of perceived hedonic quality on product appealingness. International Journal of Human-Computer Interaction, 13(4), 479-497.
- Hoysniemi, J., & Read, J. (2005). Wizard of Oz studies with children. In Proceedings of Interact 2005 Workshop on Child Computer Interaction: Methodological Research. Preston: ChiCI Group. Retrieved July 10, 2009, from http://www.chici.org/about_us.php
- Jin, S., & Kim, Y. (2006). Protocol analysis of product design assignment based on design information and design process: A case study. Journal of Korean Society of Design Science, 19(1), 109-118.
- Kankainen, A. (2002). Thinking model and tools for understanding user experience related to information appliance product concepts. Unpublished doctoral dissertation, Helsinki University of Technology, Helsinki, Finland.
- Kanda, T., Hirano, T., Eaton, D., & Ishiguro, H. (2004). Interactive robots as social partners and peer tutors for children: A field trial. Human Computer Interaction, 19(1-2), 61-84.
- Kanda, T., Sato, R., Saiwaki, N., & Ishiguro, H. (2007). A two-month field trial in an elementary school for long-term human-robot interaction [Special issue on Human-Robot Interaction]. IEEE Transactions on Robotics, 23(5), 962-971.
- Kim, J., & Kim, M. (2005). A fundamental study design-centered HRI research framework, Proceedings of the 2nd Bi-annual Design Conference of Korea Society of Design Science (pp. 68-69). Dong-Seo University, Pusan, Korea.
- KJ method. (n.d.). Retrieved February 5, 2009, from http://www.ideaconnection.com/thinking-methods/k-j-method-00011.html
- Lewis, S., Mateas, M., Palmiter, S., & Lynch, G. (1996). Ethnographic data for product development: A collaborative process. Interactions, 6(3), 52-69.
- Mugge, R., Schifferstein, H. N. J., & Schoormans, J. P. L. (2006). A longitudinal study on product attachment and its determinants. In K. M. Ekstrom & H. Brembeck (Eds.), European advances in consumer research (Vol. 7, pp. 641-647). Duluth, MN: Association for Consumer Research.
- Mugge, R., Schoormans, J. P. L., & Schifferstein, H. N. J. (2008). Product attachment: Design strategies to stimulate the emotional bonding to products. In H. N. J. Schifferstein & P. Hekkert (Eds.), Product experience (pp. 425-440). New York: Elsevier.
- Norman, D. A. (2004). Emotional design. New York: Basic Books.
- Norman, D. A. (2007). The design of future things. New York: Basic Books.
- Oh, K., Kim, J., & Kim, M. (2005). Development of humanoid robot design process-focused on the concurrent engineering based humanoid robot design. In Proceedings of IASDR 2005 Conference [CD ROM]. Douliou, Yunlin, Taiwan: National Yunlin University of Science and Technology.
- Oh, K., & Kim, M. (2007). The HRI experiment framework for designers. In Proceedings of IASDR 2007 Conference [CD ROM]. Hong Kong: The Hong Kong Polytechnic University School of Design.
- Robot Proejct in ATR. (n.d.). Retrieved March 1, 2009, from http://www.irc.atr.jp/product-e.html
- Rust, R. T., & Cooil, B. (1994). Reliability measures for qualitative data: Theory and implications. Journal of Marketing Research, 31(1), 1-14.
- Salber, D., & Coutaz, J. (1993). Applying the wizard of Oz technique to the study of multimodal systems. Lecture notes in Computer Science, 73, 219-230. Berlin: Springer-Verlag.
- Woohun, L. (1995). Analyzing the process of design thinking, Bulletin of Japanese Society of the Science of Design, 42(4), 83-92.
