
The Hedonic Haptic Player
Anna Vallgårda *, Laurens Boer, and Ben Cahill
IxD lab, IT University Copenhagen, Denmark
In this design case we present the Hedonic Haptic Player—a wearable device that plays different patterns of vibrations on the body as a form of music for the skin. With this we begin to explore the enjoyability of vibrations in a wearable set-up. Instead of implementing vibrations as a haptic output for some form of communication we want to explore their hedonistic value. The process leading up to the Hedonic Haptic player served as a first step in getting a grasp of the design space of vibrotactile stimuli in a broader sense. This is reported as seven episodes of explorations. The Hedonic Haptic player is currently equipped with three compositions, including an ambient, a rhythmic, and a combination of the two. We explore the value of the experiences they afford through two types of design critique, one from external experts and one auto-critique. We conclude that the vibrotactile stimuli we have created seems to be an acquired taste but that they can indeed create some novel and enjoyable experiences.
Keywords – Hedonic Design, Haptic Design, Pleasure, Vibrotactile.
Relevance to Design Practice – This design case proposes the Hedonic Haptic player as a platform for future open-ended explorations of designing vibrotactile expressions for pleasurable experiences. In other words, with the Hedonic Haptic player we seek to expand the design space for haptic expressions in interaction design.
Citation: Vallgårda, A., Boer, L., & Cahill, B. (2017). The hedonic haptic player. International Journal of Design, 11(3), 17-33.
Received December 27, 2016; Accepted July 6, 2017; Published December 31, 2017.
Copyright: © 2017 Vallgårda, Boer, & Cahill. Copyright for this article is retained by the authors, with first publication rights granted to the International Journal of Design. All journal content, except where otherwise noted, is licensed under a Creative Commons Attribution-NonCommercial-NoDerivs 2.5 License. By virtue of their appearance in this open-access journal, articles are free to use, with proper attribution, in educational and other non-commercial settings.
*Corresponding Author: akav@itu.dk
Anna Vallgårda is an Associate Professor and Head of the IxD lab at the IT University of Copenhagen. She works with developing a formgiving practice for interaction design and with developing new expressions for technology both material and temporal.
Laurens Boer is an assistant professor in interaction design in the IxD lab of the IT University Copenhagen. He conducts constructive design research to investigate and speculate about new forms and applications for computational materials.
Ben Cahill is lab manager of the IxD lab of the IT University Copenhagen. He has a background in Medialogy and an interest in haptic interaction design of music instruments.
Introduction
Can we enjoy silent music? Can we enjoy mere rhythms on our body? In this design case we present the Hedonic Haptic Player—a wearable device that plays different patterns of vibrations on the body as a form of music for the skin.
Using vibrations on the body is often associated with stimulating erogenous zones. This is not the intention here. We are, however, drawing on the fact that having something stimulating our body can feel good even outside an erotic context. Whether it is seeking mild distractions while performing other tasks (e.g., reading, commuting, doing dishes), using it as stress relief (to become reconnected with your body and how it feels), or simply enjoying the rhythms and the sensations they create in our body, we believe vibrations in and on the body poses a yet underexplored design space for enjoyable experiences.
In this design case we begin to explore the enjoyability of vibrations in a wearable set-up. Instead of implementing vibrations as a haptic output for some form of communication (e.g., mobile phones, computer games, robotic surgery, way finding),—we want to explore their hedonistic value and specifically their value as an enjoyable embodied experience. As such we have done a series of explorations with placements on the body, type of motors, and the materials they are embedded in, as well as composition of vibrations in strength and temporal form. As means to ground the experience in a cultural reference we can accept as wearable technology for the purpose of entertainment, we developed the Walkman of music for the skin called the Hedonic Haptic player (see Figure 1). We then composed three basic compositions of vibrations that we subjected to different forms of critique. We invited three professional critics to test it and write a two page critique, one was within product design (user experience consultant), one within new technological developments (national radio host on a technology review program), and finally an accessory designer and teacher at a design school. We further undertook to do a critique ourselves following how we also used ourselves as subjects in the design process.

Figure 1. The Hedonic Haptic player worn on the body.
The contribution of this design case is thus the Hedonic Haptic player that we propose as a platform for further studies into the enjoyable qualities of embodied vibrations. The design case is part of our larger research agenda into hedonic experiences and novel wearable technology. Hedonism is briefly defin ed as the pursuit of enjoyable experiences. What makes something enjoyable cannot be defined a priori, only experienced and thus described and reflected upon a posteriori (cf. Crisp, 2006). There is no global measure of enjoyableness independent of the view of the subject who experiences. This puts demands on the methods we use to evaluate a design. Yet, we believe that a hedonistic approach is the best way to open up new possibilities for wearable technology that can help escape the ‘Christmas tree’ or ‘Robocop’ traps (cf. Devendorf et al., 2016). By carrying out these open-ended explorations of different vibration compositions on different places on the body we begin to understand the design space of this technology and the enjoyability of these embodied experiences. As research into the design space of embodied vibrations this Hedonic Haptic player is, however, only the beginning. We see future experiments with composers composing more elaborate vibration patterns, and we foresee a more nuanced understanding of the possible experiences created from vibrotactile expressions.
Hedonic Haptics
Hedonic haptics refers to the pleasurable sense of touch. Touch is an often-underestimated sense. It is the sense of the flesh—the body—and not the mind in the Cartesian mind-body dualism that still permeates a lot of Western thinking. In the book The Senses of Touch, Paterson (2007), Paterson offered an explanation besides the Cartesian dualism of why touch has such a lowly position among the senses. He proposeed that it is a “complex constitution, being a singular sense that corresponds to no singular organ. Physiologically, touch is a modality resulting from the combined information of innumerable receptors and nerve endings concerned with pressure, temperature, pain, and movement” (p. 1). Further, the sense of touch does not just stem from a complex of receptors, it also provides us with a variety of awarenesses. “The feeling of the cutaneous touch when an object brushes our skin is simultaneously an awareness of the materiality of the object and an awareness of the spatial limits and sensations of our lived body” (p. 2). Designing technologies for touch thus inevitably becomes a complex endeavor.
Haptics
The skin is humans’ primary sensory organ and as such seems pertinent to include when designing technologies for human experiences (cf. MacLean, 2008; Paterson, 2007). Specifically, it consists of thermoreceptors that sense temperature, mechanoreceptors that sense vibration and distortion, and nocioreceptors that sense damaging stimuli that result in pain. These three types of receptors are located in different layers of the skin (MacLean, 2008). The tactile sensor resolution is determined by the size and density of the receptor field. The denser the field, the better a recipient is capable of sensing and distinguishing a series of closely spaced stimuli. Areas without hair follicles have a higher concentration of receptors (e.g., the finger tips, MacLean, 2008). Besides the tactile sensor module, the haptic sense also comprises the proprioceptive sensor module which combines knowledge of our body’s position, forces, motions, tendons, and joints. Generally, from an experiential point of view, our senses augment one another and are further augmented by our memory of past experiences. From early childhood we have learned what different surfaces feel like, so when we look at them later in life we can easily imagine how it would feel to run our fingers over materials we see. In other words, our past embodied experiences, albeit unconsciously, always play on our current experiences (cf. Gallagher & Zahavi, 2012).
The sense of touch is also used figuratively to describe profound yet abstract sensations “I was touched by her story” or “he touched my heart” (cf. Paterson, 2007). This suggests that our sense of touch is working on many levels in our experience of the world. Exploring what we can do with touch from a hedonistic point of view—as enjoyable experiences—makes sense. What we are working with here is technologically produced touch. We must therefore first explore how we react to this and to what extend we enjoy it, as it is much less understood than any human-to-human touch or human touching the world with their hands.
Enjoyment
Playing with our senses through technological stimulation will never yield singular unified experiences nor will it be judged in the same way. As there is no global measure of enjoyableness independent of the view of the subject who experiences, what is enjoyable for some may legitimately not be so for most others. An experience will always be particular to the individual drawing on the person’s particular past and present enjoyable experiences. An experience can, for instance, be more or less intense, which in turn affect its enjoyableness. Indeed, “enjoyment is more or less intense, as enjoyment, only in the sense that the experience in question is more or less enjoyable” (Crisp, 2006, p. 632). Another example of a potential measure of enjoyment is the duration of an experience that might affect its enjoyableness—if something an enjoyment is good, more of it ought to be better. However, an experience may sometimes only be enjoyable for a short while (the whiff of perfume), and at other times increase with duration, thus, duration cannot be used as a global measure of enjoyableness (Crisp, 2006). Still, we can describe and reflect upon what makes an experience enjoyable a posteriori, and there are some factors that make such accounts shareable. One factor is our culturally formed values that inevitably play into our judgment of an experience—this can either be seen as a bias in our judgment or as an unavoidable aspect of being a human in a social context—we have learned to appreciate certain aesthetics and sensations. Another factor is our relatively similar bodies and sensory systems that provide us with a common sense of reference. Drawing in the opposite direction is that no experience happens out of context and previous experiences, moreover, anticipation will influence our judgment of an experience. This complexity necessarily influences how we evaluate a design from a hedonistic perspective. We argue, that with a sufficiently developed vocabulary we can describe such enjoyable experiences and be understood even if we experience and judge them differently. The development of such vocabulary must start with particular experiences described and reflected upon. We will elaborate on this in the methods section, where we propose to rely on different forms of experience critiques as an answer.
Basically, we find that the only really meaningful way to explore the design space of technologically mediated haptics is through the experiences of various haptic expressions. How we experience things and how they present themselves before us and engage in our ecosystems is formative to what we think of doing with them—how we use them. Expanding our expressional vocabulary as well as an articulation of the enjoyable experiences they occasion would inevitably enable new and creative use of the technology at hand. This Hedonic Haptic player can thus be seen as a first step in developing a method to explore the enjoyability of vibrotactile stimuli, as well as provide a platform for developing a vocabulary that articulates these experiences.
Experiencing Temporal Form Eexpressions
Vibrotactile stimuli is inherently temporal in its expression, thus it becomes key to draw on what we know of temporal form expressions within interaction design and beyond. Vallgårda, Winther, Mørch, and Vizer (2015) did a study in which they showed how temporal forms have the potential to elicit strong experiences. While this study was done in the context of shape changes, we have reasons to believe that at least aspects of their findings transfer to the context of experiencing vibrotactile stimuli. Their results showed some connection between certain expressions and how they were experienced. Divided into three different modes of experiences: voyeuristic, vicarious, and visceral, they found characteristics of the expressions, which would elicit each of them. For instance, if a rhythm is to be perceived as belonging to a living organism it has to be slightly imprecise, as well as match a cadence that we associate with the rhythms of life (e.g., heartbeats or breathing, Vallgårda et al., 2015). Or if a temporal form is to be construed as a personality trait it has to be acting on its own in accord with some aspects of unpredictable behavior. If we are to be kept entertained by the expression of a temporal form they have to be somewhat complex and unpredictable. There examples were all characterized as being types of a voyeuristic experience in a non-visual context, like the vibrotactile, we need to understand this metaphorically as a narrative. However, nothing indicates that these findings cannot be translated into the current context. Further, while the voyeuristic experiences reported from Vallgårda et al. only addresses simple constructs (like being alive or a machine), it seems as if more complex narratives should be possible. For instance, resembling how we can appreciate characterization of landscapes or events painted in some classical music pieces (cf. Carl Nielsen’s The Fog is Lifting or Tchaikovsky’s 1812 Overture, to commemorate Napoleon’s defeat in Russia). These narratives tends to require some training in listening, and often also a primer in the form of a title or a description to set us in the right state of mind. Nonetheless, with a familiarity and a developed sophistication of expressions within vibrotactile stimuli we cannot see a reason why we should not be able to achieve something similar. When it comes to the vicarious experiences that Vallgårda et al. reported—the sense of other through which we experience—it is unlikely to happen in this context as the vibrations become embodied, and, thus, are not separated from ourselves in the experience. One aspect of their findings in relation to vicarious experiences, which could be relevant here, is how the force of an expression evoked experiences on par with that force. Gentle movements would calm people down, while strong forces would agitate people. Yet, this is something we must study. Finally, we anticipate the visceral sort of experience to be quite dominant in the vibrotactile context; however, the findings from Vallgårda et al. will not be of much help to us here as they were all explicitly related movements.
Related Work: Haptics in Interaction Design
Haptics in interaction design has most notably been used as means for communication (cf. MacLean, 2008). Often, as an alternative way to display practical information, for instance, as a communication aid for blind people (cf. Lévesque, Pasquero, & Hayward, 2007), as means to find the way with tactile stimulation either embedded in a vest (Jones, Nakamura, & Lockyer, 2004) or in a belt (Heuten, Henze, Boll, & Pielot, 2008; Van Erp, Van Veen, Jansen, & Dobbins, 2005). In these applications, haptics is (typically) used to express metaphorically derived, symbolic icons that require the user to learn and decode the vibrotactile stimuli. In other cases the type of communication is less symbolic and more affective in nature, for instance, in Shaker by Strong and Gaver (1996), which communicates subtle tactile gestures between relatives, or the wearable versions which offer different types of social awareness, e.g., TactaVest (Lindeman, Yanagida, Noma, & Hosaka, 2006), or other ambient displays, e.g., a shoulder pad (Toney, Dunne, Thomas, & Ashdown, 2003). In the more emotional corner, the Tactile Dialogues project by Schelle, Gomez Naranjo, ten Bhömer, Tomico, and Wensveen (2015) is designed to stimulate “interpersonal contact for patients in the late stages of dementia” (p. 1), and Huisman et al. (2016) attempted to simulate affective touch through vibrotactile strokes on the sensitive lower arm. This type of mediated social touch seeks to mobilize haptic technology to establish a human connection over distance (Haans & IJsselsteijn, 2006). A third body of work within haptic communication focuses on augmenting graphical user interfaces through vibrotactile or force feedback devices as means to provide an extra layer of feedback on a user’s actions, e.g., in game controllers (cf. Israr, Kim, Stec, & Poupyrev, 2012; Israr & Poupyrev, 2011) or music/art compositions (Bongers, 2000). This latter body of work is perhaps more about enhancing an experience than to provide necessary information to complete a task, and as such it is related to using haptics for pleasure.
Other work into haptics designed for pleasure and aesthetic experiences often combines haptics with auditory experiences. Gunther and O’Modhrain (2003), for instance, developed a suit (see Figure 2) that would provide the wearer with haptic accompaniments of musical pieces. Gunther and O’Modhrain experimented with a number of different ways to use haptics in this context, one was as simulated heart beats and blood flows to accompany soundscapes of an anatomy lecture, another began with a vibrotactile introduction and ended in a audio simulated thunderstorm still accompanied by vibrotactile stimulation to simulate rain. When used in combination with musical pieces, they used haptics to exaggerate or translate specific parts of the music to specific parts of the body. While this is an interesting project into hedonic haptics, so much is going on by the authors own admission that it becomes difficult to differentiate what role the haptics play in the experience. Clearly, the physical appearance/sensation of the suit itself must be an important part of the overall experience (see Figure 2).

Figure 2. The vibrotactile composition suit developed by Gunther and O’Modhrain (2003).
In other projects, the chairs Emoti-Chair and Haptic Chair were used as the basis form from which to provide the users with a haptic experience. Here the haptic stimulations are simple amplifications of the natural vibrations produced by the sounds/music (either using a frequency model or a track model). The haptic chairs are primarily meant to be experienced by the hearing impaired but can also be used as an augmented experience for those with normal hearing capacity (cf. Nanayakkara, Taylor, Wyse, & Ong, 2009; Karam et al., 2010). The chairs seem to be appreciated by the hearing impaired as they enable them to get more out of listening to music, but the enjoyability of the haptic experience is not really addressed (i.e., is the simple enhancement of the musical vibrations a good way to experience the music? What kind of experience is it?).
In the following section we describe the design of our Hedonic Haptic player. We have in its current form composed three different haptic expressions that can be experienced on different places on the body as the wearer sees fit. We see the player as an open-ended platform that can be used to further explore the design space of hedonic haptics, and, through that, possibly also expand the use of haptic communication.
The Hedonic Haptic Player
The Hedonic Haptic player is designed to provide pleasurable vibrotactile sensations on the body. The haptic output is provided through three different sized domes—with diameters of 50, 60, and 80 mm—each of which is individually connected to a main unit with an audio jack cable. Each dome comprises a vibration motor molded into a cylindrically shaped silicon mass, which in turn is housed in a 3D printed PLA shell. The enclosing shell has a fine circular notch that fits a 2 mm thick ring shaped leather. This leather ring is attached to an elastic band, which is adjustable in length with a double hole cord lock, to enable the wearer to position the dome on different places of their body (see Figure 3).

Figure 3. The Hedonic Haptic player, including the three domes, the control unit, and the three jacks
(elastic bands not shown in the picture).
The main unit has dimensions of 50 × 100 × 40 mm, and houses a Raspberry Pi motor driver board and battery pack. It is made from a combination of a PLA housing and 3 mm birch wood. It has a battery compartment that is sealed with a leather strip, which magnetically locks onto the housing unit. Upon powering on, a soft blue LED lights up next to a 4-position switch and the three audio jack slots. The unit can be worn on the wearer’s pocket or belt with a metal belt clip that is mounted on the backside of the unit (see Figure 3).
The Hedonic Haptic player comes in two color versions: an all black one with a black encasing and black details (leather and elastic band), and a version with a petroleum color encasing and elastic bands with brown leather details. The physical appearance of the Hedonic Haptic player is inspired by a combination of the traditional Walkman and more current headphone designs (see Figure 4).

Figure 4. Consumer products that served as inspiration for the physical appearance of the Hedonic Haptic player.
Left: Bang and Olufsen’s Beoplay speaker designed by Cecilie Manz studio. Middle: a girl from the 80’s wearing a Walkman.
Right: a guy from today wearing expressive headphones.
The purpose of spending effort on the material appearance of the Hedonic Haptic player is the fact that the aesthetic experience cannot easily be isolated from the vibrotactile stimuli alone. The context of the experience—the appearance of the device and how it is worn—will inevitably influence the overall experience. Thus, we have tried to mimic current musical/wearable consumer products as means to set the scene of a hedonistic experience, rather than, for example, a communication device.
Technical Setup of the Hedonic Haptic Player
Each dome contains a 25 mm diameter eccentric mass vibration motor, which is capable of 2.2 G of force. The three motors in the Hedonic Haptic player are controlled by a circuit consisting of 2 LM293 motor driver chips driven by pulse signals from the General Purpose IO (GPIO) of a Raspberry Pi. In the current design it is possible to switch between three compositions and off using a DP4T switch accessible on top of the main casing. A rechargeable Lithium Polymer battery, providing 800 mAh of current at 7.2 V, powers the system. The input supply is regulated twice; once by a UBEC (Universal Battery Eliminator Circuit) to supply a steady 5 V for the Raspberry Pi, and further with an LM319 Regulator to supply 3.3 V to the motor. The Raspberry Pi draws around 500 mA of current, the motors draw around 65 mA each. These factors make it pertinent to perform the high efficiency regulation with the UBEC and less efficient regulation with a standard regulator. In practice, the battery lasts 45 min to an hour of constant use—not unlike the old Walkman.
Three Haptic Compositions
For this first version of the Hedonic Haptic player, we decided to create three compositions as an initial exploration of the design space. Thus, we wanted them to be sufficiently different. Where the basic building blocks of music are rhythms, harmony, melody, dynamics, and timbre, in haptic compositions we only have rhythms and dynamics to build from. We are experimenting with achieving some resemblance of timbre, but in this version we solely worked with rhythms and dynamics. Different waveforms and their amplitudes comprise the dynamics of the vibrations, where the timing of events and the number and modulation of wave cycles generate the rhythms. After some explorations (see the Design Process below for details), we decided that an ambient, a rhythmical, and a mix of the two would make a good start. Since the technical setup largely defines our composition space (design space), we briefly describe this before going into the three distinct compositions.
The Raspberry Pi runs a Python script that outputs a Pulse Wave to one of the three outputs for the motor control and monitors the state of the switch. The Pulse Wave signals have their duty cycle modulated to create various haptic effects. The nature of these modulations is what defines the differences in the compositions. For example, short high-amplitude pulses at regular intervals form rhythms. The system is based on a list of events that are executed sequentially to form an entire composition. Events are cycles of a pattern that repeat over a composition-dependent number of iterations. The nature of an individual event is determined by the application of weighted-random parameters at the time of creation (see Figure 5). The choice for working with an aspect of randomness came from our early explorations where discernable repetition quickly became annoying and thus defies the pleasurable aim (see Episode 2 in the Design Process).
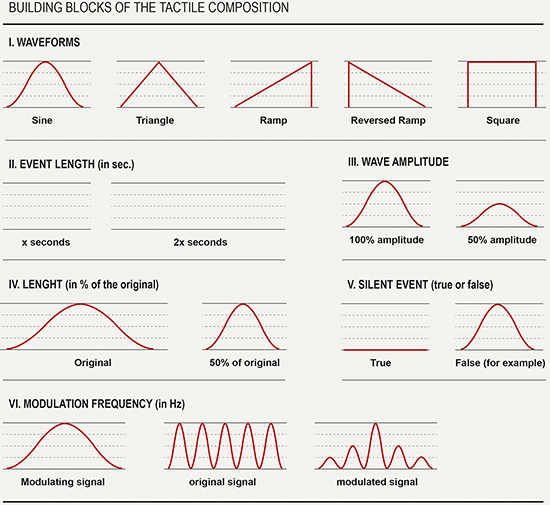
Figure 5. Overview of event parameters that were manipulated to compose the vibrotactile compositions.
The Ambient composition (see Figure 6) was seeded with low amplitude (10-50%), slow modulation (below 0.1 Hz), smooth waveforms (Sine or Triangle), a 0.2 probability that an event will be silent, long event length (30-60 seconds), and a pulse length of 100%. This provides an output that is smooth, low amplitude and which changes slowly without an explicit time base or central rhythmic foundation, and without sudden changes in amplitude. In contrast, the Rhythmic composition (see Figure 7) was seeded with a high amplitude (80-99%), no modulation, sharp waveforms (Sawtooth or Square), 0.01 probability of a silent event, short event length (1-2 seconds), and a pulse length of 15-50%, which creates sharper events. This provides a high amplitude, quick-changing output with an emphasis on percussive hits with a common time base. The combinatory composition combined the ambient and the rhythmic in a 50-50 mix resulting in a more complex landscape of events.
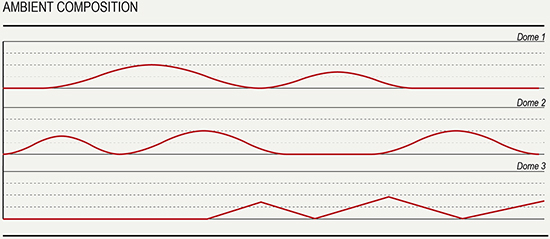
Figure 6. Example of how an ambient composition might look.
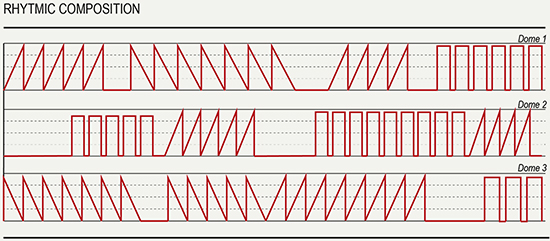
Figure 7. Example of how a rhythmic composition might look.
Research Method
With the Hedonic Haptic research project we set out to explore the enjoyability of a technologically mediated haptic design space with a specific focus on vibrotactile stimuli, following a research through design approach where the Hedonic Haptic player serves both as a resulting platform for further explorations, and where the design process leading up to its design also informs our understanding of the design space.
Design Process
We have chosen to put an emphasis on the design process in this design case as it was a valuable source of discovery and served to deepen our understanding of the hedonic haptic design space. As described, we are working from a hedonistic perspective, meaning we are working in a constant back-and-forth between technological development and descriptions and reflections on how we experience the changes. In this process we (the authors) have used our own bodies and our own reflections drawing on a first person perspective (Svanaes, 2017). Using ourselves had the obvious advantage of being readily available, and given that the audience was not defined/confined, our bodies were as good as any. Furthermore, our research approach here resembles the technology-first approach argued by Sundström et al. (2011) in their paper on inspirational bits, and the exploratory experimental approach argued by Hallnäs and Redström (2006) with our own bodies thrown in as guinea pigs in a manner of embodied ideation and discovery (cf. Wilde, Vallgårda, & Tomico, 2017). We report on the process in what we call episodes, some of which were distributed in time and space but pertained to the same questions. Each episode had distinct outcomes that pivoted the design process as well as our understanding forward. Some also helped us define future avenues of research.
Critiques
With this design case we thus propose a platform in the shape of the Hedonic Haptic player and a series of avenues for future research as the primary outcome. Yet, the current form of the player also deserves some reflection, and for this we have experimented with two types of critique, one is an auto-critique—a modified version of Bardzell’s (2011) interaction criticism in which he proposed a set of criteria modified from classic art and literature critique. The other is an expert critique where we have invited three critics from related fields to try it out over a couple of days, and who gave us their first person perspective on the experiences. Relying on different forms of critique seemed a viable way of gaining insights into the nature of the experiences. As we know little a priori of what could be enjoyable, it seems like a viable strategy to let a group of people trained in reflecting on their own experiences articulate what they enjoyed or disliked.
Auto-Critique
In our auto-critique we operated with the following six criteria. Part of the first criteria is addressed in the design decisions, thus, the reflection here focused on the physical aspects of the interaction. Criteria 5 and 6 have been omitted from this auto critique as they, in a way, have already been addressed above as part of related work and the theory behind hedonic design and temporal form.
- The design: a close reading of the physical, temporal, and interactive aspects. How does it present itself?
- Your experience of the design. After using the design over some time, as intended as well as in unintended ways: How does it affect you? What rubs the wrong way? What pleasures? What intellectual experience do you get? What aesthetic experience do you get?
- Under the surface: What norms and expectations are built into the design? Who appears to be the ideal user? How is the ideal user communicated? Is there any hegemony embedded into the design? Can the narratives and the hegemony in the design be resisted?
- The social aspect: How will the design change our relation to other people? What are the ethical and moral consequences of this design?
- Other designs: How is it related to other similar designs? How is it different? How does it relate to the ecosystems of technology it is intended to become a part of?
- Theory: What are the relevant theories to unpack and understand this design?
The auto critique was based on one of the authors (Vallgårda) using the player for about two hours distributed over a couple of days.
Expert Critique
For the expert critique we invited an accessory designer and teacher at a design school, an experience design consultant in an international firm, and a journalist who hosts a technology consumer program on national radio. They were introduced to the Hedonic Haptic player, how it worked, what we expected of them: to write 1-2 pages with a description of their experiences, an assessment of the player’s qualities and flaws as a potential consumer product, and their association to other products and experiences—in other words, points 2 and 5 from the auto-critique. We also told them that this was a research project but not what our incentives and research questions were. They received no compensation. They each had the player over a couple of days with a battery life of 1-2 hours to use as they saw fit. and an extra couple of days before they handed in the review. We gave them no instructions on when and for how long to try the player and its various compositions.
Two of the expert reviews turned out a bit disappointing as they focused on the physical design and only briefly addressed the experiences of the vibration compositions. This primarily fell back on us and how we introduced the task to the critics, but it probably also confirms the importance of the physical design around what otherwise appears to be a solely temporal and technological design.
In the following sections we will address what we have learned about the design space of hedonic haptics this far. First, through a detailed walk through of our design process and then through the two types of critiques, the auto and the expert.
Design Process: The Hedonic Haptic Player
As described above, this design process was driven by a desire to explore how technological induced vibrotactile stimuli can form the basis for hedonic experiences. The point is that through seeking new enjoyable experiences we expand and explore the design space of this type of output, with the intention that this could eventually lead to new uses of haptics in interaction design.
Below we present seven episodes that illustrate our design actions. Each episode is a collection of design activities, some spread over time and space but which roughly relates to one of the form elements of interaction design: physical form, temporal form, and interaction gestalt (Vallgårda, 2014). In Episode 1: Getting Familiar with the Design Space, we explore the interaction gestalt by experiencing possible expressions of the vibrotactile realm and play around with how we potentially would react to them. In Episode 2: Exploring the Temporal Form of Vibrations, we focus on the experiential qualities of the different building blocks of the vibrotactile compositions. In Episode 3: Exploring the Embodied Experience of Vibrations, we perform a systematic exploration on how vibrations feel on different parts of the body. In episode 4, we consider the electromechanical and material aspects of the vibrations as means to find the best balance between expression space and comfortably vibrotactile stimulation. In episode 5, we begin to look at product design factors, exploring the aesthetic and cultural references suitable to set the right scene for a hedonic experience. In episode 6, we explore the practical aspects of wearability, while lastly, in episode 7, we are concerned with bringing our experiential knowledge of the vibrotactile together and compose three tactile compositions.
For each episode we express the dominant design contribution, how that contribution is positioned in the overall design process, and how it enabled us to identify avenues of further research. What has been key in this process is the open-ended manner with which explorations in each episode has helped us identify the next episodes, which became necessary as means to develop an intimate relationship with the design material and as such begin to grasp the intricacies of the design space.
Episode 1: Getting Familiar with the Design Space
We started out with off-the shelf vibrators of various shapes and sizes (bought in a sex shop), and we proceeded to strap them on to different places on the body (see Figure 8). To give us flexibility we would sew a range of fabric bands with pockets so we could move and adjust the vibrating sensations. In the first round of explorations we simply familiarized ourselves with the experience. It quickly became clear that while the experience was intriguing and fun in all its novelty, the repetitive vibration patterns that were pre-programmed in the devices were tedious to experience for longer periods of time. An experience which corresponds with the findings from Vallgårda et al. (2015) that complexity and variation is needed to keep people entertained. Nonetheless, this first hand experience enabled us to familiarize with vibrotactile stimuli and helped imagine which temporal formgiving aspects could be considered in its shaping.

Figure 8. Getting familiar with vibrotactile stimuli. Left: an off-the-shelve vibration motor kit. Middle and right: vibration motors sewn in fabric bands and strapped on the body, with the remote to control the intensity of the vibrations.
Episode 2: Exploring the Temporal Form of Vibrations
In the next episode we decided to make our own set-up so we could explore the temporal form of the vibration even better. This meant a shift from off-the-shelf products to Arduino, Max MSP, and basic coin-type vibration motors. We embedded these motors in vinyl material to shield from overstimulation. We now used up to three motors strapped to different places on the upper body with an elastic band in much the same way as in the previous experiment (see Figure 9).

Figure 9. Explorations of different vibration compositions using a setup of three coin-type motors strapped to the upper body.
Developing a graphical user interface in Max (see Figure 10) gave us freedom to explore the temporal forms of the vibrations. Again, the explorations were open-ended because we still had to get an experiential grip on the design space. With the motors and general technical set-up used at this point we were able to play with vibration events (in terms of wave form, amplitude, and frequency), time interval between these events, and patterns in repetitions of events. As such we were able to create a much larger set of vibration compositions. We also explored how we could create a sensation of a rhythm that traveled around the body by alternating between the three motors. Something we decided to save for later/future research as such expression was somewhat complex compared to the stage we were in. All these explorations were done on each of the authors in turn. It quickly became clear that the closer the expression came to recognizable rhythms the more annoying it was, but as soon as we introduced a degree of variation and randomness the experience could be quite appealing.
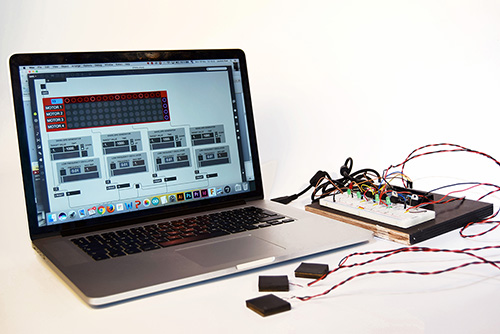
Figure 10. Experimental setup with Graphical user interface in MAX/MSP and Arduino running three coin-type motors.
Episode 3: Exploring the Embodied Experience of Vibrations
From episode 2, it became clear that we needed to do a more systematic exploration on how vibrations felt on different places on the body. Thus, using a simple drawing of a body, all three authors went through recording their experiences indicating whether they were good, bland, or annoying (see Figure 11). We used a stable vibration in this experiment, and varied the pressure applied on the body to maximize potential effects of the vibrating stimuli.

Figure 11. Exploring and mapping vibrotactile potential on the body. Left: experimental setup. Right: mapping the level of enjoyment into unpleasant (blue), neutral (grey), and pleasant (black).
While there were few indicators of differences in experiences we mostly agreed on the outcome. For example, vibrations in the armpit and knee area were unpleasant, while right above the shoulder blades and lower back were perceived as pleasant. However, our intention with these explorations was not to come up with a more generalizable result. Rather, it was a way to more systematically explore and discuss where on the body vibrotactile stimuli could result in pleasant sensations. With this in mind, and due to the sensorial variations and the obvious differences in height and girth, we decided that the method we designed for strapping on the vibrators needed to be highly flexible, giving the user as much freedom to place and adjust as possible.
Episode 4: Exploring Qualities of Different Motors and Materials
At this stage we have explored the building blocks and potentials of vibrotactile compositions, we have explored where on the body such compositions could result in hedonic sensations, but we still needed to explore what different actuators do to the vibrotactile experience. Just as we still needed to explore the mediating materials that go between motor and skin and their physical forms, and how all this influences our experience of the vibrations.
In episode 2, we used a coin-type low current motor with 10 mm diameter that is capable of producing 0.55 G of force (Figure 12, top left). It gave a sort of high pitch vibration. These motors are typically found in mobile phones or other applications where space and power are limited, and where resolution is not a priority (where resolution is referred to as the motor’s ability to separate between adjacent frequencies). These smaller motors prohibit short, percussive actuations due to a smeared time-domain performance caused by a stop time of over 100 milliseconds. Thus, we decided to explore eccentric mass vibration motors that would provide substantially more force and precision, and give us a larger space of vibrotactile expressions (see Figure 12, second, third and fourth top picture). We ended up choosing to work with a 25 mm diameter eccentric mass vibration motor, which is capable of a 2.2 G of force (see Figure 12, third picture on top). This motor’s dynamic range is greater than the coin-type motor, the starting and braking times slower, and the maximum amplitude higher, which gave a sense of a much deeper vibration pitch, and was overall much more pleasurable. It also offered the best time-domain performance, with a lag and rise time of 14 ms and 33.5 ms respectively, compared to 34 ms and 83 ms for the coin-type. We also did a quick remake of the systematic bodily explorations (see Figure 11) and only found that places there were bland and uncomfortable before turned into bland and pleasurable respectively. In other words, there was a better hit rate with this motor.
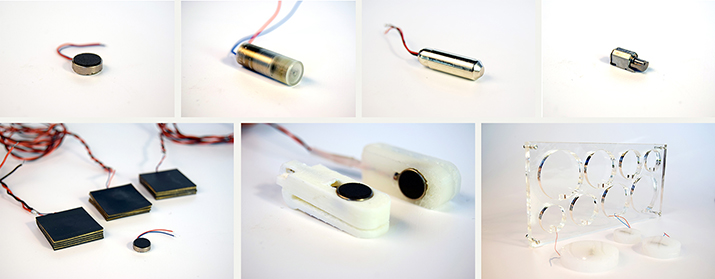
Figure 12. Top: exploration of vibration motors. Bottom: vibrational resonance with different materials.
Bottom left: coin-type motor enclosed in layers of rubber. Bottom middle: coin-type motor in 3D printed casing.
Bottom right: eccentric motor molded in silicone.
The motor would always have to be incased in another material to prevent skin or clothes damage (while all our explorations were done on top of clothes we wanted to make sure they could not damage the skin if they were applied directly thereto). Thus, we also explored materials for enclosing the motor. In particular, how well the mediating material diffuses and mediates the vibration. In the early explorations—while still working with the coin motor—we used thin layers of laser-cut rubber on one motor (see Figure 12, bottom left) and 3D printed PLA shape tightened around the motor in another (see Figure 12, bottom middle). From this we learned that the rubber muffled the vibrations too much and the PLA form too little. We further learned that it was necessary to reduce the amount of air around the motor as much as possible, to avoid the resonating material producing noise upon vibration. We then experimented with molding the vibration motor in silicon as this showed to both reduce noise and diffuse the vibration well without muffling the effect too much. This also worked well for the eccentric mass vibration motor (see Figure 12, bottom right).
Episode 5: Finding Cultural References for a Hedonic Haptic Experience
In this episode we were interested in finding suitable cultural references for the form and materials that would make up the Hedonic Haptic player. For instance, we did not want people to associate the player with medical equipment, to a technological experiment, or to cheap consumer technology. Rather, we wanted them to readily accept this would be a hedonic experience. We also wanted this to be something we would use in our everyday life, thus, we soon decided it should be a mobile device, that is, something we would potentially wear while going about doing other things. Lying around in our lab was a stack of old Walkmans which proved to be a great reference for two reasons, they represented a new way of enjoying music while on the move, and secondly, they were bulky enough that we could possibly match the form factor with our technological setup. While we do not really accept the bulky casing today, we do accept enormous headphones (see Figure 4, right), which as reference point would allow creating an apparent fashion statement for the vibrator encasing. Further, we wanted to update the aesthetics to suit some of the most popular consumer products within high-end music equipment, thus, we looked towards B&O’s new series called Beoplay designed by Cecilie Manz studio (see Figure 4, left). With these references in mind, we chose to design a main unit that acts like a hub to which the vibration motors can be connected (see Figure 13, left). Much like headphones are connected to a Walkman.
Further, while it is given in a Walkman design that the headphones needs to cover each ear, it is not really given how many vibration motors goes into a hedonic haptic experience. Gunther and O’Modhrain (2003) included in their vibrotactile suit (see Figure 2) actuators to cover most parts of the body. We did not want people to put on a whole suit to have this experience, so we decided to keep the number of motors down to a manageable number. In our experiments in episode 2, we had experimented with the sensation of having a rhythm travel around your body. While we postponed this as an avenue for later explorations in any systematic way, we still decided to be able to compose something to that effect, thus, we needed at least three motors. And in the interest of keeping it simple, we settled on three motors. We decided to make the encasing of the silicon embedded motors into domes of different sizes. The dome shape offered a reminder of the headphones, and the difference in sizes was a means to differentiate the aesthetics. Indeed, the variation in sizes would not have any effect on the vibrotactile sensations, however, we envisioned it could serve as a clue for where and how to place them on the body, and how to compose for them in the future (we could also imagine a variation in strength in future iterations). Figure 13, middle picture, depicts our experimentation with different sizes of the domes.

Figure 13. Left: A concept sketch of the Hedonic Haptic player. Middle: rapid prototypes of different sized domes for the vibration motors. Right: the look and feel of a Walkman.
Finally, as means to escape the clinical/prototype look we decided to work with a finish and a color scheme that would place the association closer to the Beoplay look—or as close as you get within a prototype lab (see Figure 4, left). From our color explorations (see Figure 14, left), we decided to do one all black with black leather and elastic band details, and one in dark petroleum with brown leather and elastic band (see Figure 14, right).

Figure 14. Exploring different material and color schemes for the domes.
Episode 6: Exploring Wearability
At this point we had settled on the Hedonic Haptic player as a wearable device. A takeaway from our previous design explorations (mainly episode 3) was that the placement and adjustment of the encased motors should be flexible to accommodate individual experiences. Also, the motors had to be fastened in a way that allowed for a relatively tight fit to enable the best sensations from the vibrations. Thus, we chose to explore different elastic strap-on mechanisms (see Figure 8 and Figure 9) and found that a round elastic band in combination with a cord lock provided a good solution (see Figure 15, right).
We also needed a way to attach the vibrating domes to the elastic band with some tolerance, as the natural motion of a moving body would cause dispositions of statically attached vibrating elements. We decided on a ring shaped mechanism that could be pulled over the vibrating domes and in which the vibrating dome would have some rotation freedom. We then explored different materials for the ring (perspex, rubber, and leather) to find the right stretch, tolerance, and aesthetics (see Figure 15, left and middle).

Figure 15. Exploring mechanisms and materials for attaching the vibrotactile modules onto the body.
Left and middle: ring material explorations. Right: cord lock and elastic exploration.
Episode 7: Composing for the Hedonic Haptic Player
In this episode, we switched from Arduino to Raspberry Pi as means to support more complex compositions down the road. Raspberry Pi allows for compositions to be played back from an SD card and was thus much more suited for a stand-alone portable device. This also meant a break with the graphical user-interface of Max MSP, this being currently replaced by a simple python script. In the future we wish to develop some sort of interface for the python script whether physical or graphical to allow for musical composers and others to partake in composing for the Hedonic Haptic player.
For now, however, the player is still only a proof of concept and we are the only composers in this design case. Given all our previous explorations we had begun to form an idea about what kind of experiences we could create. Our aim was to create different forms of enjoyable experiences by means of vibrotactile stimuli. Since such experiences always will be highly dependent on the mood and situation of the wearer we chose to compose for different moods: one that would be soft and mellow, one that would be more upbeat, and, as a simple solution, one that would be a combination of the two.
From episode 2, we had become familiar with the experiences of the different dynamics and rhythms (see Figure 5). We had gained an understanding of how different transitions, strengths of vibrations, and recurrences of events would feel like on our body and what effects each of us liked. In the first iteration we created an ambient composition and a rhythmical one.
The ambient composition only made use of the gradual weave forms (sine, triangle, ramp, saw tooth), half strength on the amplitude, long transitions, and a fair number of silent events. Upon experiencing it we found that the many silent events made us question if it was broken (really not a thought we wanted our critics to have). We also found that the dragged out weave form events made the sensation too monotonous. Thus, we tightened up the ambient composition by removing some silent events and creating more variation. We also maintained the shortened amplitude, only raising the starting point—again to reduce the likelihood of too much silence (the beginning of a weave form is not really noticeable on the body, see end result in Figure 6).
In the first iteration, the rhythmical composition was made out of a combination of ramp and saw tooth weave forms but with full amplitude and short events and rarely any silence. The experience was not really rhythmical yet. We then decided to include square wave forms where the transitions from 0-100 were instantaneous; here we also raised the starting point from 0 to 10. This immediately changed the experience from a semi ambient experience to one with clear and distinct rhythms (see end result in Figure 7).
A key element in both compositions was a factor of randomness. This was an obvious choice, given that we are not actual composers and that we had learned in the early episodes of the process that predictability in vibration pattern made the experience very quickly become tedious. We do, however, easily foresee how this can be omitted with imagination and mastering of the expression space. But it is clear that for any composition to be pleasurable it needs a high degree of complexity. Not unlike what Vallgårda et al. (2015) discovered in their study of when we are sufficiently entertained.
Together, all these episodes have led us to design the Hedonic Haptic player so as to support future studies of this design space in the future. Specifically, we want to explore the possibility of more deliberate and advanced compositions, possibly addressing specific parts of the body to create these around the body experiences we played with in episode 2, which was also utilized by Israr et al. (2012) in their surround haptics chair. We also see a potential in playing around with different vibrotactile strengths in the different size domes.
In the following sections we in a sense continue our exploration of the aesthetic qualities of the Hedonic Haptic player. First, in the form of an auto-critique, and secondly in the form of expert critics. This we hope will lend us more insight in to experiencing the haptics outside the context of the lab.
Auto-critique
The Hedonic Haptic player I (Anna Vallgårda) am testing has been modified so it can be plugged into a power supply instead of running on batteries. The advantage is that I can try it out for a longer period of time, the disadvantage is that it is not really mobile. Thus, I only tried it out at home.
Physical Aspects of the Player
Applying the two straps on the body is not unlike strapping on a bra (see Figure 16). I chose to take out the jacks to have more flexibility when placing them on the body without too much entanglement. Adding the jacks afterwards was similar to opening a particular stroppy bra strap or dress zipper—especially with the domes placed on my back. I’m wearing them on top of my rather thick sweater since it is a cold winter. This likely muffles the effect some but does not seem to take away too much.
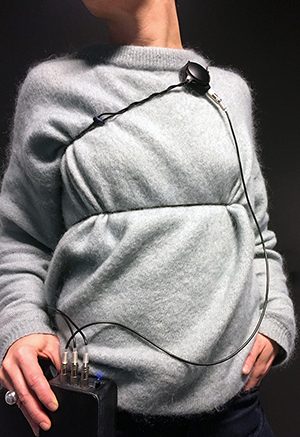
Figure 16. Picture of me wearing the Hedonic Haptic player on top of my sweater.
In the first session, I placed the two larger domes on the back just below each shoulder blade. This is not too comfortable, so I adjusted them slightly higher up on top of the shoulder blades as I recall from the experimentation that this was a pleasant area. After wearing it for a while I realized that only one was responsive. One had turned around on the back and one of the jacks had popped out (likely not having been attached completely from the beginning). It is really bulky and not particularly easy to maneuver during a bathroom visit. Looking in the mirror it is also clear that I look a bit ridiculous with black straps all over my upper body. It does not carry any S/M connotation as I had suspected, but I do not really know what it reminds me of, which is likely the problem. I wouldn’t directly walk on to the street with this.
The Compositions
The first composition I tried out was the ambient one. I wore the player for about 20 min and while it was there it was firmly in the background while I was writing this paper. I will return to this later. I then switched to the rhythmical composition to get the strongest contrast between compositions. This was readily demanding more attention and I was actually experiencing the composition and the rhythms, and took pauses from writing. Deliberately ignoring it and continuing to write I realized after ca. ten min. that I am a bit annoyed and a little stressed out by the rhythms. When I returned my focus to the rhythms rather than the writing this stress/annoyance disappeared—not unlike when I listen to too-demanding music while I write (e.g., acid jazz). Once in a while the rhythmical composition went into a “dynamic” where the two domes on the back seemed to battle as they play in each other’s off beat. That was a groovy effect. Later it felt like the rhythm traveled around my body as the beat in the three domes were displaced so as to sense a continuation between them. This was an interesting effect—my body sort of came together with the composition.
After a break I tried out the combo composition. It was much more complex. As it played in the background while I wrote it seemed a bit schizophrenic and neither here nor there. When I sat back and payed attention, it appeared to have none of the intricate interplays between the domes as did the rhythmical one, rather it had more of the constant summing as the ambient did.
On day two, I wrote for an hour with the ambient composition on. When I stopped and payed attention, I again experienced how the vibrations traveled around on my body like it did with the rhythmical composition yesterday only it was less structured. This gave a sensation that they were somehow holding my body together with invisible ties—keeping it all inside. It was crucial for this experience that all three points were in play. When one jack falls out, it goes back to being just separate vibrations.
I tried out he combo composition again for a while but it did not really work in the sense that it was annoying to write with it in the background and it was too ambient to peak my interest for long.
The Embedded Norms
It is always a challenge to pinpoint your own norms and assumptions. Ideally one would probably have to estrange oneself from the design somehow so as to better come back and look at it with fresh eyes. Thus, this part of the critique might appear somewhat superficial.
First of all, the straps and wires demand some dexterity and cognitive ability to put on and adjust. Also, the straps make the player unsuited for small children as they represent too much of a strangle opportunity. Secondly, the attempt of a modern sleek design with exclusive leather details likely appeals to the young urban population—as did the Walkman and as does the Beoplay used for references. Yet, its somewhat bulky design and the difficulty to decode what the design is about if it isn’t accompanied by an oral or written explanation would probably prevent the same audience to actually wear it on the street. Indeed, it would take a critical mass of users to make it an everyday artifact. However, it could be enjoyed at home where appearance is less important or that the people around you would know what it was.
Social Aspects of the Player
With the disclaimer that I have only been alone while trying it out as my family is traveling, I foresee some awkward social conversations possibly stigmatization because of the players odd look. That said, the compositions did not demand all my attention, so unlike listening to music on headphones, I would not be in a social bubble. But as the experience is private and the domes are not easily transferable it will be hard to share the experience in a social context. If more people would wear them it could be possible to share compositions—as is possible via Bluetooth in some music players. So two or more people could share a haptic experience without involving the rest of the world.
Expert Critiques
In the feedback from the expert critics we have chosen to focus on their reports on their vibrotactile experiences. As mentioned, two of them spent most of their feedback on the physical design, which is indeed important but which we find more relevant as notes for our redesign in the next iteration and less relevant for understanding the design space of hedonic haptics.
Journalist
I only managed to use it for a total for 20 min. Tried every setting 5-8 min each.
The important thing was, I must admit, that I basically never ‘got into the rhythm’ with the various vibration patterns…. Regardless which setting I used felt it annoying most of the time. Just when I thought I could catch a pattern did it change, and the unevenness did not become my friend. That is also why I think it should follow some music, something more longitudinal, with regular rhythms—alternatively sounds from a game that doesn’t follow a rhythm but does have a clear purpose. Alternatively, maybe breathing or heartbeats for a sort of mindfulness-feedback.
Experience Designer
I tested it after approximately two hours of hard physical training where I btw. used a couple of fitness wearables (a heart rate monitor and a cadence sensor). All three ‘thingies’ tied to the upper body on top of a t-shirt. I tested each function for approx. 10 min. Ambient, rhythmical, and mixed. It felt a bit like massage—or maybe that was wishful thinking after the physical activity. Unfortunately, the vibrations reminded me a bit of a phone vibrating on silent, which felt more stressful than relaxing. It became too much after 25 min. Ambient was the most comfortable and maybe it is in that a future potential is to be found.
Accessory Designer
The Hedonic Haptic device was mounted on the body and I walked around with the device fastened first on each side of the ribcage, under the arms and the big one on the upper arm. In the beginning did the devices cause unease in the body but after I grew accustomed to the vibrations and was able to start connecting the points and experience an interplay did the unease gradually dissipate. The domes connect variable points on the body. There is a great variation as to where on the body I experiences a resonance space or a sense of being able to receive/register and connect the vibrations. I experienced a need to concentrate on wearing the device.
It could be interesting if there in the room you are in was music/sound which somehow would correspond to the inner resonance space as means to experience and even bigger space. The body can actually feel as if it is outside the experience depending on where on the body the domes are placed. It would be interesting to explore where in the body the vibrations can penetrate—susceptibility and irritation vary depending on placement.
Meditation—directing the attention to pain and unease for in that way to dissipate the pain/unease is what I am associating when I place the domes on different parts of the body. The attention is moved around, but you have to be open-minded to achieve alleviation or a sense of calm in the place in question because you have to follow the preprogrammed rhythm. The more subtle vibrations works best in that sense—to let the attention wander without getting confused. The obvious sound of a motor is disturbing when the vibrations are powerful. Maybe it would be possible to work with larger spectrum of frequencies. I imagine it would be interesting to explore the effect of various frequency impulses on the body over time and work towards harmonic/disharmonic and rhythmical multiplicity.
I like the idea of the harmonic micro and macro cosmos that the device reminds me of.

Figure 17. Pictures of a dancer friend of the accessory designer who also tried the Hedonic Haptic player.
The dancer’s experiences of the player weren’t reported as specifically coming from her. So we assume the accessory designer merely included the possible reflections from their discussion of the player as her own.
Analysis of Hedonic Haptic Experiences
We set out to build a platform that would enable us to explore the enjoyability of various vibrotactile expressions. Generally, it is clear that the unfamiliarity of the haptic vibrations makes them difficult to decode, and the vibrations seem to estrange the wearer, at least to begin with. The one critic who used it for more than 20 minutes (the accessory designer) managed to surpass the initial unfamiliarity and began to experience interplay both between the domes and different places on her body. This is likely related to the lack of language for our sense of touch that Paterson (2007) addressed. In this case we are neither familiar with the experience nor know how to talk about it that makes it readily annoying (like listening to most kinds of music for the first time, e.g., punk, 12 tone, or classical). Further, some might never grow to enjoy it. In the auto-critique, the author was of course already familiar with the experience and knew what to expect, thus, the experience only really became annoying when the type of vibration did not match the context—in this case writing. Indeed, besides becoming familiar with the sensation of vibrations, some compositions of vibrations also seem to focus our attention to the vibrations themselves, while others create embodied sensations, and still others switch focus to the device. These differences in experiences also seem to be conflated with the context of use: what are the activities during, what were they immediately before, how much time is available for the experience, etc.
Looking towards Verbeek (2008, 2015), we can elicit a way to describe the changes in experiencing the Hedonic Haptic player depending on familiarity, type of composition, and context of use. Verbeek argued that our relationship with technology is poorly understood through the concept of interaction, given that we have a variety of relations with technology not all of which include actions “between a human being, on one hand, and a technological artifact, on the other” (Verbeek, 2015, p. 26). Building on Don Ihde, Verbeek proposed instead to see our relationship with technology as either a hermeneutic relation (technology represents the world), an alterity relation (we interact with a device), an embodied relation (we experience the world through the technology), a background relation (the technology changes the context of our perception), a cyborg relation (the technology is part of our being), or a composite relation (we see the world as the technology sees it).
In this light we would argue that the initial experience the expert critics all reported can be seen as a case where the critic and the player is in an alterity relation. The critics are experiencing the device as an other, and possibly also how the otherness of the device acting directly on their body almost feels as a form of violation or annoyance definitely not enjoyable. There is also a suggestion from two of the critics, most elaborately explained by the accessory designer, that this alterity can be used to direct focus on specific parts of the body, and as such possibly be used to alleviate stress and pain based on the idea of mindfulness.
Another relation emerged when the accessory designer was able to start connecting the points and experience interplay, and that the domes connect variable points on the body, and Vallgårda, who did the auto-critique report, experienced how the vibrations traveled around on my body. This gave a sensation that they were somehow holding my body together with invisible ties—keeping it all inside. The relation between the critics and the player is an embodied if not a downright cyborg experience. The distance between the device and the body is dissipating and merging into a new combined sensation. This seems to be caused by compositions where the three domes are vibrating with short intervals following each other with the same short temporal distance. It does not seem to matter what wave forms or lengths are at play but how they interplay.
A third relation is most notable in the auto critique, in which the Hedonic Haptic player is used as a form of mild distraction while writing. The relation between the critic and the player thus became what Verbeek refered to as a background relation. The critic’s writing was now done in the new slightly modified version of the world where the body is subjected to compositions of mild vibrations. The ambient composition seems best suitable for this purpose since the rhythmical composition quickly became too stressful and demanded attention back to the device.
These three forms of relations our critics experienced to various degrees has allowed us to arrive at a basic understanding of what we can do with the Hedonic Haptic player. However, to find the right balance between annoying alterity and embodied experience seems key to unlock the potential of hedonic haptics for the purpose of creating enjoyment. What is clear is that while the accessory designer and the auto critic seemed to enjoy certain parts of the experience, we still need more explorations to uncover the depth of the possible experiences. It is also likely, as with music, that some people will never grow to enjoy the vibrotactile experience or that it takes longer to form for others. The suggestions from the expert critics that the vibrations should be accompanied by music (or vice versa) could be interpreted as a way to make the vibrations seem more familiar as we are not used to vibrations in and by themselves.
This design case and the Hedonic Haptic player have, however, demonstrated that there is a wide design space for further study. Exploring deliberately composed vibrations, feasibly for specific locations on the body, appears to be the next logical step—for this we will experiment with inviting various professional music composers. We will also combine such advanced compositions with more comprehensive experience reports, potentially leading to an understanding of the variations in what is enjoyed, as well as serving as a better basis for developing a vocabulary of the experiences. Connecting the dots on the body is a start but it is only that.
References
- Bardzell, J. (2011). Interaction criticism: An introduction to the practice. Interacting with Computers, 23(6), 604-621.
- Bongers, B. (2000). Physical interfaces in the electronic arts. In M. M. Wanderley & M. Battier (Eds.), Trends in gestural control of music (pp. 41-70). Paris, France: Ircam-Centre Pompidou.
- Crisp, R. (2006). Hedonism reconsidered. Philosophy and Phenomenological Research, 73(3), 619-645.
- Devendorf, L., Lo, J., Howell, N., Lee, J. L., Gong, N.-W., Karagozler, M. E., … Ryokai, K. (2016). “I don’t want to wear a screen”: Probing perceptions of and possibilities for dynamic displays on clothing. In Proceedings of the Conference on Human Factors in Computing Systems (pp. 6028-6039). New York, NY: ACM.
- Gallagher, S., & Zahavi, D. (2012). The phenomenological mind. London, UK: Routledge.
- Gunther, E., & O’Modhrain, S. (2003). Cutaneous grooves: Composing for the sense of touch. Journal of New Music Research, 32(4), 369-381.
- Haans, A., & IJsselsteijn, W. (2006). Mediated social touch: A review of current research and future directions. Virtual Reality, 9(2-3), 149-159.
- Hallnäs, L., & Redström, J. (2006). Interaction design: Foundations, experiments. Borås, Sweden: The Interactive Institute and The Swedish School of Textiles, University College of Borås.
- Heuten, W., Henze, N., Boll, S., & Pielot, M. (2008). Tactile wayfinder: A non-visual support system for wayfinding. In Proceedings of the 5th Nordic Conference on Human-Computer Interaction (pp. 172-181). New York, NY: ACM.
- Huisman, G., Frederiks, A. D., van Erp, J. B. F., & Heylen, D. K. J. (2016). Simulating affective touch: Using a vibrotactile array to generate pleasant stroking sensations. In Proceedings of the International Conference on Human Haptic Sensing and Touch Enabled Computer Applications (pp. 240-250). Berlin, Germany: Springer.
- Israr, A., Kim, S. -C., Stec, J., & Poupyrev, I. (2012). Surround haptics: Tactile feedback for immersive gaming experiences. In Proceedings of the Conference on Human Factors in Computing Systems (Extended Abstracts, pp.1087-1090). New York, NY: ACM.
- Israr, A., & Poupyrev, I. (2011). Tactile brush: Drawing on skin with a tactile grid display. In Proceedings of the Conference on Human Factors in Computing Systems (pp. 2019-2028). New York, NY: ACM.
- Jones, L. A., Nakamura, M., & Lockyer, B. (2004). Development of a tactile vest. In Proceedings of the 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (pp. 82-89). New York, NY: IEEE.
- Karam, M., Branje, C., Nespoli, G., Thompson, N., Russo, F. A., & Fels, D. I. (2010). The emoti-chair: An interactive tactile music exhibit. In Proceedings of the Conference on Human Factors in Computing Systems (Extended Abstracts, pp. 3069-3074). New York, NY: ACM.
- Lévesque, V., Pasquero, J., & Hayward, V. (2007). Braille display by lateral skin deformation with the STReSS2 tactile transducer. In Proceedings of the 2nd Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (pp.115-120). New York, NY: IEEE.
- Lindeman, R. W., Yanagida, Y., Noma, H., & Hosaka, K. (2006). Wearable vibrotactile systems for virtual contact and information display. Virtual Reality, 9(2-3), 203-213.
- MacLean, K. E. (2008). Haptics in the wild: Interaction design for everyday interfaces. Reviews of Human Factors and Ergonomics, 4(1), 149-194.
- Nanayakkara, S., Taylor, E., Wyse, L., & Ong, S. H. (2009). An enhanced musical experience for the deaf: Design and evaluation of a music display and a haptic chair. In Proceedings of the Conference on Human Factors in Computing Systems (pp. 337-346). New York, NY: ACM.
- Paterson, M. (2007). The senses of touch: Haptics, affects and technologies. Oxford, UK: Bloomsbury.
- Schelle, K. J., Gomez Naranjo, C., ten Bhömer, M., Tomico, O., & Wensveen, S. (2015). Tactile dialogues: Personalization of vibrotactile behavior to trigger interpersonal communication. In Proceedings of the 9th International Conference on Tangible, Embedded, and Embodied Interaction (pp. 637-642). New York, NY: ACM.
- Strong, R., & Gaver, B. (1996). Feather, scent and shaker: Supporting simple intimacy. Retrived from http://people.cs.vt.edu/~wangr06/touch%20review%20origanization/StrG96.pdf
- Sundström, P., Taylor, A. S., Grufberg, K., Wirström, N., Belenguer, J. S., & Lundén, M. (2011). Inspirational bits: Towards a shared understanding of the digital material. In Proceedings of the Conference on Human Factors in Computing Systems (pp. 1561-1570). New York, NY: ACM.
- Svanaes, D. (2017, May 6). Designing for the body: Combining 1st, 2nd and 3rd person perspectives. Paper presented in the Workshop on Soma-Based Design Theory at the Conference on Human Factors in Computing Systems, Colorado Convention Center, Denver, CO.
- Toney, A., Dunne, L. E., Thomas, B. H., & Ashdown, S. P. (2003). A shoulder pad insert vibrotactile display. In Proceedings of the 7th International Symposium on Wearable Computers (pp. 35-44). New York, NY: IEEE.
- Vallgårda, A. (2014). Giving form to computational things: Developing a practice of interaction design. Personal Ubiquitous Computing, 18(3), 577-592.
- Vallgårda, A., Winther, M., Mørch, N., & Vizer, E. E. (2015). Temporal form in interaction design. International Journal of Design, 9(3), 1-15.
- Van Erp, J. B. F., Van Veen, H. A. H. C., Jansen, C., & Dobbins, T. (2005). Waypoint navigation with a vibrotactile waist belt. ACM Transactions on Applied Perception, 2(2), 106-117.
- Verbeek, P. -P. (2008). Cyborg intentionality: Rethinking the phenomenology of human: Technology relations. Phenomenology and the Cognitive Sciences, 7(3), 387-395.
- Verbeek, P. -P. (2015). Beyond interaction: A short introduction to mediation theory. Interactions, 22(3), 26-31.
- Wilde, D., Vallgårda, A., & Tomico, O. (2017). Embodied design ideation framework to leverage the power of estrangement. In Proceedings of the Conference on Human Factors in Computing Systems (pp. 5158-5170), New York, NY: ACM.
